Проективный тест Маркерта. | Тест по психологии по теме:
Интерпретация теста:
1. Вы торопливы, вы чем-то озабочены, вам недостаёт терпения. Вероятно, вы честолюбивый человек.
2. Вас привлекает скромность, вам хочется жить просто, без претензий. Возможно, вы что-то подавляете в себе.
3. Вы хотите быть собранным и решительным человеком. Но, кажется, вам не достаёт спокойствия.
4. Вы цените в себе и в других сдержанность и чувство собственного достоинства. Не находят ли вас несколько старомодным?
5. Вам хотелось бы хоть на время освободиться от дел и обязательств, вам надоели ответственность и здравый смысл. Возможно, в прошлом вы несколько перестарались с самодисциплиной.
6. Вы терпеливы, вы считаете, что всё должно идти своим чередом, без лишнего напряжения. Не прячете ли вы от себя страх перед жизнью?
7. Вас тяготит необходимость так или иначе «играть» в общении с людьми, вам хочется непринуждённости.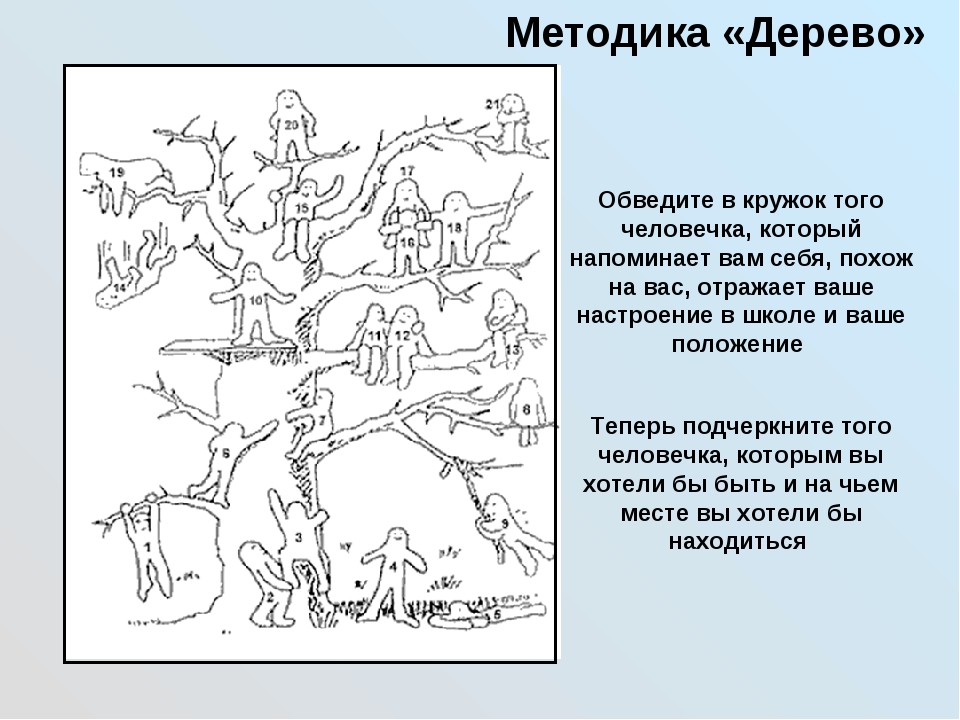 Может быть, её-то вам и не хватает?
Может быть, её-то вам и не хватает?
8. Вас восхищает в людях смирение и готовность оказать помощь другим, вам нравится укрощать самолюбие. А вы, должно быть, самолюбивы.
9. Вам хочется быть смелее, агрессивнее в жизни, вы не позволяете себе идти на компромиссы. Возможно, в прошлом вы шли на них чаще, чем следует?
10. Вам хочется беспечности, праздности; друзья считают вас недостаточно целеустремлённым. Нe гложет ли вас втайне забота о будущем?
11. Вам недостаёт энергии, вы нуждаетесь в отдыхе. Видимо, вы долго испытывали внутреннее напряжение.
12. Вам хотелось бы довольствоваться тем, что есть. Возможно, вы цените радость и душевный покой выше успехов. Задумайтесь – а так уж серьёзны ли ваши успехи?
13. Вы считаете, что, не следует желать невозможного; вам хочётся расслабиться и жить спокойно. Может быть, вам не хватает бойцовских качеств?
14. Вы невозмутимый человек, во всяком случае, хотите им выглядеть. Скорее всего, это чисто внешняя невозмутимость.
15. Вы практичны, аккуратны» любите порядок и честность. Возможно, друзья считают вас недостаточно гибким человеком.
16. Вы скептик, вам не хватает энтузиазма, вы доверяете только проверенному опыту. Но кое-кому вы, вероятно, кажетесь большим ребёнком.
17. Вы предпочитаете решительный натиск, а не маневрирование. Может быть, вам не хватает характера чтобы быть столь решительным.
18. Вам нравятся утончённость, изысканность, элегантность. Но вас не назовёшь собранным человеком. Возможно, вы слабохарактерны.
19. Вам хочется вырваться из однообразия обыденной жизни, вы любите удивительное. Не витаете ли вы в облаках?
20. Вы избегаете искушения расслабиться, побездельничать, вам нравятся энергия и деловитость. Вероятно, вам не хватает собранности.
21. Вы тяготитесь формальными правилами поведения, вам хочется ярче выражать свои чувства, свою личность. Вам, видимо, трудно обуздать себя.
22. Вы избегаете поверхностных суждений, вам нравятся основательность и серьёзность. Возможно, вы иногда теряете чувство юмора.
Возможно, вы иногда теряете чувство юмора.
23. Правдивость и твёрдость – вот те качества, к которым вы стремитесь. Не бываете ли вы иногда бестактны?
24. Вы мягкий и миролюбивый человек; во всяком случае вам хотелось бы обладать этими качествами. Возможно, вы не вполне обладаете ими.
25. Вы эмоциональны и готовы к энтузиазму, вас не привлекает рассудительность. Но в глубине души вы, по-видимому, склонны к сомнениям.
26. Вам нравятся устойчивость взглядов, неизменность привычек, вы не любите перемен. Возможно, вы не лишены властолюбия.
27. Вы скучаете, вам хотелось бы новых, освежающих . впечатлений, но это требует активности. А вам, по-видимому, нелегко расшевелиться.
28. Вам хочется перемен в жизни и в собственной ду ше, но что-то мешает вам, сдерживает вас. Задумайтесь, не слишком ли поверхностны ваши идеи о перестройке собственной жизни?
29. Вам хочется посвятить себя серьёзному делу и найти, пусть скромное, но своё место в жизни. Не овладевает ли вами подчас жалость к себе?
30. Вы точны, рассудительны, вам нравится быть здравомыслящим человеком. Но, может быть, вы не так уж хорошо отличаете факты от собственных домыслов?
Вы точны, рассудительны, вам нравится быть здравомыслящим человеком. Но, может быть, вы не так уж хорошо отличаете факты от собственных домыслов?
31. Вы настроены оптимистически и верите в успех. Возможно, вы думаете, что глубокомыслие ведёт к ме ланхолии. Так ли уж верна эта мысль?
32. Вам нравятся доброта, дружелюбие, великодушие. Возможно, вы своенравны и упрямы.
33. Вы деловиты, практичны и не любите тратить время на пустые разговоры. Похоже, что вы иногда не замечаете людей вокруг себя.
34. Вы напористый и целеустремлённый человек. Но, может быть, за этим скрываются горечь и пессимизм?
35. Вы цените возвышенное и прекрасное. Не исключено, что иногда вы смотрите свысока на тех, кто, по вашему мнению, не способен ценить это, как вы.
36. Вы склонны смотреть на вещи юмористически и философски. За этим, видимо, немало печали.
37. Вы неуступчивы и не хотите от кого-либо зависеть, вам хочется всего достичь собственными силами. Возможно, иногда вы забываете о доброте.
38. Вы оживлены и избегаете серьёзных размышлений. Но, кажется, вам есть, о чём задуматься.
39. Ваше настроение можно охарактеризовать как во одушевление, вы хотели бы поговорить с тем, кто вас поймёт, но держаться подальше от скучных людей. Ка жется, вы не часто бываете в подобном состоянии.
40. Вы чувствуете желание стать скромнее, чаще уступать, легче прощать людям обиды. Может быть, вы сами обидели кого-то больнее, чем хотели?
41. Вникнуть, понять, а не настаивать на своём, быть терпимым, а не категоричным, таково ваше желание. Вы избегаете предвзятых суждений – не грешили ли вы ими прежде?
42. Вы участливый человек и способны глубоко чувствовать горе другого. Но всегда ли вы готовы помочь по-настоящему?
43. Вами овладела лень, вам не хочется действовать или ломать голову над чем бы то ни было. Но, кажется, у вас честолюбивые замыслы.
44. Вам хочется бежать от шума и суеты и заглянуть в себя как можно серьёзнее. Пожалуй, вы давненько этого не делали.
45. Вы хотели бы с чем-то разделаться, что-то уладить: побыстрее и без особой затраты сил. Видимо, вы смутно чувствуете, что это невозможно.
46. Вам хочется ясности, безмятежности и простоты. По-видимому, ваш интеллектуализм не даёт вам «опроститься» до такой степени.
47. Вы благонамеренный человек. Вы стремитесь всегда быть справедливым. Не исключено, что вы легко поддаётесь ожесточению.
48. Реалистичность, отказ от «воздушных замков» – вот что вы цените в себе и других. Видимо, вы впечатлительны.
49. Вам нравятся предприимчивость и изобретательность. Но, похоже, что вам недостаёт энтузиазма или энергии.
50. Вам хочется веселья и блеска; может быть, в этом немного шутовства? Что вас гнетёт?
5I. Вы цените умеренность, вам нравится покой. Возможно, вам не достаёт честолюбия или смелости.
52. Живость и непринуждённость вы ставите выше трезвости. Кажется, вам не хватает самодисциплины.
53. Вы довольно умеренны в себе и любите независимость. Возможно, вы кажетесь гордецом, но временами вы чувствуете себя беспомощным.
Возможно, вы кажетесь гордецом, но временами вы чувствуете себя беспомощным.
54. Вам хотелось бы сделать каждый день праздником; похоже, что вы живёте сегодняшним днём, не задумываясь о будущем.
55. Вам хочется быть безмятежным, не замечать своих и чужих неурядиц. Вероятно, вам не хватает уве ренности в себе.
56. Вам хочется быть сильным, вы боитесь в чём-ни будь выказать слабость. Возможно, вас считают злым; в действительности вы куда слабее, чем думаете.
|
Цифра на пересечении номеров фигур 1 |
Интерпретация
Вы честолюбивы, торопливы, чем-то озабочены. Наберитесь терпения. |
|
2 |
Вас привлекает скромность, простота, отсутствие претензий. Что Вы подавляете в себе? |
|
3 |
Хотите быть собранным и решительным. |
|
4 |
Вы цените сдержанность, чувство собственного достоинства. Не слишком ли Вы консервативны? Чуть старомодны? |
|
|
Вам хочется освободиться от дел. Надоели ответственность, обязанности, здравый смысл. Возможно, слишком много самодисциплины? |
|
6 |
Вы терпеливы. Считаете, что все должно идти своим чередом, без лишнего напряжения. Чего Вы боитесь? Не самой ли жизни? |
|
7 |
Вас тяготит необходимость “играть роль” в общении. Хочется простоты и легкости, взаимодействия “без масок”. А внутри у вас достаточно свободы? |
|
8 |
Вас восхищает в других смирение, готовность помочь другим. |
|
9 |
Вам хочется быть смелым, агрессивным, бескомпромиссным. Раньше часто шли на уступки? Устали от компромиссов? |
|
10 |
Вам хочется беспечности, легкости, праздности. Есть ли у вас цель? Нe гложет ли вас забота о будущем? |
|
11 |
Острый недостаток энергии. Вы очень долго испытывали внутреннее напряжение. Вам нужен отдых! |
|
12 |
Вам хотелось бы довольствоваться тем, что имеете. Цените радость, душевный покой выше успехов. Но так ли серьезны ваши успехи? |
|
13 |
Считаете, что не нужно хотеть невозможного. |
|
14 |
Вы невозмутимы. Или хотите так выглядеть? Это чисто внешняя невозмутимость? |
|
15 |
Вы практичны, аккуратны, любите порядок и честность. Но достаточно ли Вы гибкий человек? |
|
16 |
Вы скептик. Наблюдается нехватка энтузиазма. Доверяете только проверенному опыту. Но кое-кому Вы кажетесь большим ребенком. Знаете, кому? |
|
17 |
Предпочитаете решительный натиск взамен маневрирования. Но хватает ли вам сил быть столь решительным. |
|
18 |
Вам нравятся утонченность, изысканность, элегантность. |
|
19 |
Вам хочется вырваться из однообразия, обыденности, постоянства. Вы любите удивляться. Но есть риск “витания в облаках”. |
|
20 |
Вы совершенно не расслабляетесь. Не любите бездельничать. Энергичны и деловиты. Но при этом вам не хватает собранности. Много суеты. |
|
21 |
Вы тяготитесь рамками принятых правил поведения и морали. Хочется ярче выражать свои чувства и личность? Осторожнее! Вам порой трудно обуздать себя. |
|
22 |
Вы избегаете поверхностных суждений. Нравятся основательность и серьезность. Но, пожалуйста, не забывайте про чувство юмора! |
|
23 |
Правдивость и твердость – ваши цели. |
|
24 |
Вы добрый и миролюбивый человек. Но недостаточно или не истинно. Постарайтесь нести благо людям, а не просто быть “мягким”. |
|
25 |
Вы эмоциональный энтузиаст. Логика и рассудительность не про вас. Но в глубине души, вероятно, склонны сомнениям. |
|
26 |
Вам нравятся устойчивость взглядов и неизменность привычек. Не любите перемен. Вы властолюбивый? Не слишком ли? |
|
27 |
Вы скучаете, вам хотелось бы новых освежающих впечатлений. Чтобы их добыть, будьте активнее. Расшевелите себя! |
|
28 |
Хочется перемен в жизни и в собственной душе? Что мешает вам? Что сдерживает? Задумайтесь, не слишком ли поверхностны ваши идеи о перестройке жизни? |
|
29 |
Вам хочется посвятить себя серьезному делу, найти свое место под Солнцем. |
|
30 |
Вы точны, рассудительны, мыслите здраво. Но точно ли отличаете объективные факты от собственных домыслов? |
|
31 |
Вы настроены оптимистично. Руководствуетесь верой в успех. Думаете, что глубокомыслие всегда ведет к меланхолии. Но подумайте, может немного поразмыслить вам бы не помешало? |
|
32 |
Вам хочется получать доброту от других. Дружелюбие и великодушие окружающих для вас очень важны, но добры ли вы? Не слишком ли своенравны? Может быть, упрямы? |
|
33 |
Вы деловиты и практичны. Не любите тратить время на пустые разговоры. Все же иногда замечайте — вокруг вас есть люди! |
|
34 |
Напористый и целеустремленный человек. |
|
35 |
Вы цените возвышенное и прекрасное. Правда иногда смотрите свысока на не ценящих красоту. Не надо так! |
|
36 |
Вы смотрите на все с юмором и по-философски. Отлично! Но за этим, видимо, притаилось немало печали. |
|
37 |
Вы хотите быть независимым, всего достичь собственными силами. Возможно, иногда вы забываете о доброте, неуступчивы. |
|
38 |
|
|
39 |
Кажется, вы не часто бываете в подобном прекрасном расположении духа. |
|
40 |
Вникнуть, понять, быть терпимым — вот ваши установки. Избегаете предвзятых суждений, категоричности и нетерпимости. Неужели грешили ими раньше? |
|
41 |
Вы участливы, способны глубоко чувствовать горе другого. Но всегда ли вы готовы помочь по-настоящему, а не просто поплакать за компанию? |
|
42 |
Лень! Вам не хочется действовать, что-либо решать или ломать голову над чем бы то ни было. Однако, ваши замыслы очень честолюбивы. |
|
43 |
Вам хочется бежать от шума и суеты, заглянуть в себя как можно глубже и серьезнее. Давно этого не делали. |
|
44 |
Вам нужно что-то уладить, причем побыстрее и без затраты сил. Но есть предчувствие, что все не так то просто. |
|
45 |
Вам хочется ясности, легкости, безмятежности, простоты. Но привычка интеллектуализировать не позволяет так “распускаться”? |
|
46 |
Вы благонамеренный человек. Стремитесь всегда быть справедливым? Но от этого легко поддаетесь ожесточению. |
|
47 |
Реалистичность и отказ от построения «воздушных замков» Вы цените и в себе, и других. Но есть в вас некая воздушность — впечатлительность. |
|
48 |
Вам нравятся предприимчивость и изобретательность, но недостает энтузиазма или энергии. |
|
49 |
Вам хочется веселья, блеска, даже шутовства. Вас что-то гнетет? |
|
50 |
Вы цените умеренность, нравится покой. Но честолюбие и смелость нужны вам, так как пойдут на пользу! |
|
51 |
Живость и непринужденность Вы ставите выше трезвости ума. Ой! Вам не хватает самодисциплины. |
|
52 |
Вы довольно уверены в себе, независимы. Возможно, кажетесь гордым, но временами чувствуете себя беспомощным. |
|
53 |
Хочется, чтобы каждый день был праздником? Похоже, Вы живете сегодняшним днем, не задумываясь о будущем. |
|
54 |
Вам хочется быть безмятежным, не замечать ни своих, ни чужих невзгод. |
|
55 |
Вам хочется быть сильным. Боитесь своей слабости? Но Вы куда слабее, чем думаете. И в этом как раз и есть ваша сила! |
|
56 |
Возможно, вас считают злым из-за того, чтобы всячески пытаетесь выказать силу. Есть над чем задуматься! |
 Найдите баланс внутри, успокойтесь.
Найдите баланс внутри, успокойтесь.
 Хочется расслабиться, жить спокойно. Вам хватает бойцовских качеств?
Хочется расслабиться, жить спокойно. Вам хватает бойцовских качеств? Но вас не назовешь собранным человеком. Возможно, вы слабохарактерны.
Но вас не назовешь собранным человеком. Возможно, вы слабохарактерны.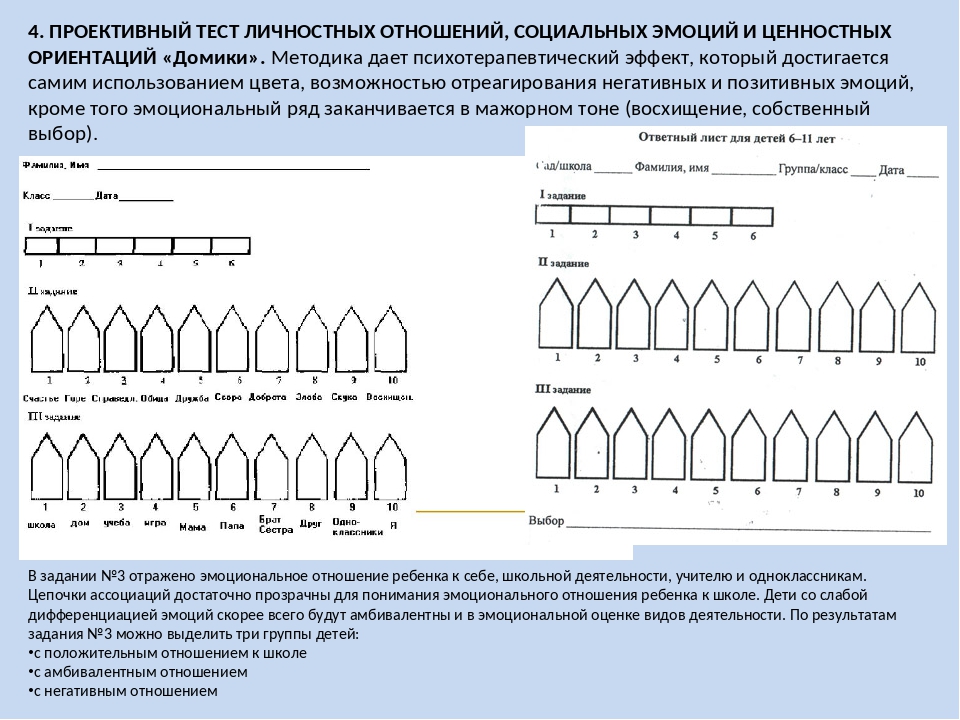

 Это про вас? Но не скрываются ли за смелостью горечь или пессимизм?
Это про вас? Но не скрываются ли за смелостью горечь или пессимизм? Это воодушевление! Вы хотели бы поговорить с тем, кто поймет это состояние. Избегайте скучных людей.
Это воодушевление! Вы хотели бы поговорить с тем, кто поймет это состояние. Избегайте скучных людей. Это то, чего просит душа. Следуйте ее зову.
Это то, чего просит душа. Следуйте ее зову. 
 Поработайте над уверенностью в себе.
Поработайте над уверенностью в себе.Проективный тест дерево 0 | Образовательный портал EduContest.Net — библиотека учебно-методических материалов
Методика «Дерево»
Ученикам предлагаются листы с готовым изображением сюжета: дерево и располагающиеся на нем и под ним человечки. каждый учащийся получает лист с таким изображением (но без нумерации фигурок). Не желательно предлагать ученику вначале подписывать на листе свою фамилию, так как это может повлиять на их выбор. Задание дается в следующей форме: «Рассмотрите это дерево.
 Вы видите на нем и рядом с ним множество человечков. У каждого из них — разное настроение и они занимают различное положение. Возьмите красный фломастер и обведите того человечка, который напоминает вам себя, похож на вас, ваше настроение в новой школе и ваше положение. Мы проверим насколько вы внимательны. Обратите внимание, что каждая ветка дерева может быть равна вашим достижениям и успехам. Теперь возьмите зеленый фломастер и обведите того человечка, которым вы хотели бы быть и на чьем месте вы хотели бы находиться ».Интерпретация результатов
Вы видите на нем и рядом с ним множество человечков. У каждого из них — разное настроение и они занимают различное положение. Возьмите красный фломастер и обведите того человечка, который напоминает вам себя, похож на вас, ваше настроение в новой школе и ваше положение. Мы проверим насколько вы внимательны. Обратите внимание, что каждая ветка дерева может быть равна вашим достижениям и успехам. Теперь возьмите зеленый фломастер и обведите того человечка, которым вы хотели бы быть и на чьем месте вы хотели бы находиться ».Интерпретация результатовИнтерпретация результатов выполнения проективной методики «Дерево» проводится исходя из того, какие позиции выбирает данный ученик, с положением какого человечка отождествляет свое реальное и идеальное положение, есть ли между ними различия. Интерпретация разработана нами с учетом устных рекомендаций Д. Лампенов, опыта практического применения методики и сравнения ее результатов с наблюдениями за поведением учеников, данных, полученных от учителей и родителей, из беседы с ребенком.
Выбор позиции № 1, 3, 6, 7 — характеризует установку на преодоление препятствий№ 2, 19, 18, 11, 12 — общительность, дружескую поддержку№ 4 – устойчивость положения (желание добиваться успехов, не преодолевая трудности)№ 5 — утомляемость, общая слабость, небольшой запас сил, застенчивость№ 9 — мотивация на развлечения№ 13, 21 – отстраненность, замкнутость, тревожность№ 8 — характеризует отстраненность от учебного процесса, уход в себя№ 10, 15 — комфортное состояние, нормальная адаптация№ 14 — кризисное состояние, «падение в пропасть».Позицию № 20 часто выбирают как перспективу учащиеся с завышенной самооценкой и установкой на лидерствоСледует заметить, что позицию № 16 учащиеся не всегда понимают как позицию «человечка, который несет на себе человечка № 17», а склонны видеть в ней человека, поддерживаемого и обнимаемого другим (человечком под № 17).Автор : Л.П. Пономаренко , издание «Психологическая профилактика дезадаптации учащихся в начале обучения в средней школе. (Методические рекомендации для школьных психологов ) «, (1999).
 источник : psi.chol.ru
источник : psi.chol.ruПриложенные файлы
Психологическое тестирование — Психологос
Психологическое тестирование (раздел психодиагностики) — исследование определённых психологических качеств и свойств личности путем использования психологических тестов. Психологическое тестирование используется при отборе на работу, в психотерапии и психологическом консультировании и пр.
Хороший психолог (не обязательно с дипломом психолога: это может быть опытный руководитель, квалифицированный кадровик, внимательный психиатр) расскажет вам о человеке все или почти все без всякого тестирования. Иногда для этого достаточно беседы, иногда и беседа не нужна, достаточно одного взгляда: на лицо человека, на его походку, достаточно услышать интонации его разговора. Однако хороших психологов мало, а разбираться в людях нужно, и вот тут пригождаются как раз психологические тесты.
Что могут, а что не могут психологические тесты? Труднее всего в человеке определить две казалось бы элементарные вещи: здравый смысл и порядочность. Другие психологические особенности (экстраверсия, доброжелательность, общий интеллект, невротизм, открытость опыту) — поймать с помощью тестов вполне реально.
Другие психологические особенности (экстраверсия, доброжелательность, общий интеллект, невротизм, открытость опыту) — поймать с помощью тестов вполне реально.
Основные характеристики психологических тестов — это валидность, надежность, репрезентативность и достоверность. Валидность — это соответствие результатов теста той характеристике, для измерения которой он предназначен. Надёжность — свойство теста давать при повторном измерении близкие результаты. Надёжность как внутренняя согласованность — направленность всех элементов тестовой шкалы на измерение одного качества. Репрезентативность — соответствие между нормами (интервалами на тестовой шкале), полученными на выборке, и нормами, которые могут быть получены на популяции. Достоверность — свойство теста противодействовать фальсификации — намеренному или бессознательному искажению результатов испытуемыми.
В процессе разработки и апробации разные исследователи могут менять количество и состав вопроса теста, но в таком случае трудно сопоставлять результаты, полученные разными исследователями. Только со временем создается стандартизованный тест — психологический тест с четко определенными неизменным списком вопросов, инструкцией, методами обработки результатов и подсчета баллов. На создание эффективного психологического теста уходит от 10 лет работы авторских коллективов. Качество теста обеспечивается многоступенчатой процедурой проверки и стандартизации его шкал. Тестов, прошедших адаптацию к российской действительности 1990-х годов мало, поэтому выбор хороших психологических тестов для оценки персонала затруднен.
Только со временем создается стандартизованный тест — психологический тест с четко определенными неизменным списком вопросов, инструкцией, методами обработки результатов и подсчета баллов. На создание эффективного психологического теста уходит от 10 лет работы авторских коллективов. Качество теста обеспечивается многоступенчатой процедурой проверки и стандартизации его шкал. Тестов, прошедших адаптацию к российской действительности 1990-х годов мало, поэтому выбор хороших психологических тестов для оценки персонала затруднен.
Профтестирование, или тестирование в кадровой работе — метод отбора кандидатов для выполнения работы. В профтестировании различаются две основные категории тестов: тесты, созданные для оценки эффективности исполнения работы, профессиональных знаний и умений; и тесты, созданные для оценки черт характера и свойств (специальных способностей), которые способствуют эффективному исполнению работы.
Психологический тест — стандартизированное задание (испытание), по результатам выполнения которого судят о психофизиологических и личностных характеристиках, знаниях, умениях и навыках испытуемого. Тесты, по которым судят о знаниях, умениях и навыках испытуемого, занимают промежуточное положение между психологическими, образовательными и профессиональными тестами.
Тесты, по которым судят о знаниях, умениях и навыках испытуемого, занимают промежуточное положение между психологическими, образовательными и профессиональными тестами.
Тесты личности (Personality tests) — тесты психологического тестирования, направленные на изучение характера, способностей, эмоций, потребностей и других свойств человеческой личности. (См.Классификация психотипов). Личностные тесты подразделяются на проективные тесты, личностные опросники и тесты деятельности (ситуационные тесты, кейсы).
Тест интеллекта — тесты психологического тестирования, направленные на изучение степени развития интеллекта у человека.
Вербальный тест (Verbal test) — тест, построенный на использовании языка, когда тестируемый, выполняя задание, должен не совершать действия, а описать их словами.
Тест достижений (Achievement test) — стандартизированный тест, конструируемый на учебном материале и предназначенный для оценки уровня овладения учебными знаниями и навыками.
Тест на профессиональную пригодность — психологический тест, направленный на выявление индивидуальных интересов и предпочтений, помогающий определить наиболее предпочтительную для конкретного человека работу.
При приеме на работу в качестве тестов также нередко используются тест имитации и кадровый спектакль. Тест имитации — психологический тест, состоящий в том, что человеку предлагается выполнить задание, хотя ситуация, в которой предстоит выполнить задание, не воссоздается. Кадровый спектакль — процедура, где претендентам дается твореское групповое задание, требующее командной работы и выявляющее такие личностные характеристики, как готовность брать на себя инициативу, ответственность, позитив и конструктив во взаимодействии.
Результаты тестов нередко представляют в виде психограммы (Psychogram), графически наглядно изображая результаты исследования психической деятельности индивида с помощью ряда тестов.
Проективные методики:Опросники:Тесты
- тест Кэттелла (16 PF-опросник),
- тест Равена,
- Соционический ДВ-Тест,
- MMPI,
- диагностический комплекс 7 (САН, ММИЛ, СМИЛ, СМИЛ сокр.
 , Кэттелл, Спилбергер),
, Кэттелл, Спилбергер),
- индикатор типов Майерс и Бриггс (MBTI)
- шкала самооценки (Спилбергер-Ханин),
- шкала депрессии,
- комплекс программ Келли,
- интерактивная психодиагностика,
- репертуарные методики,
- психогеометрия,
- методика изучения внутрисемейных отношений
- NEO PI-R
- [[FIRO-B]]
- Диагностика межличностных отношений Лири
- Полиграф (детектор лжи)
- Анализ почерка (графология)
Полезные ссылки
★ Цветоаналитический тест Фрилинга — психодиагностические м
Пользователи также искали:
онлайн тест, тест фрилинга онлайн, тест фрилинга пройти онлайн, цветовое зеркало фрилинга, тест, Фрилинга, фрилинга, онлайн, тесты, психологические, психологические тесты, онлайн тест, цветовое зеркало фрилинга, тест люшера, псих тест, психологические тесты на личность, псих, Цветоаналитический, личность, пройти, цветовое, зеркало, люшера, Цветоаналитический тест Фрилинга, тест фрилинга онлайн, тест фрилинга пройти онлайн, цветоаналитический тест фрилинга,
Психологические тесты, которые интересны каждому
Первые психологические тесты появились на заре развития человеческой цивилизации. Есть информация, что тестирование на способности человека проводилось среди чиновников Китайской империи еще две тысячи лет назад. В Древней Греции философы готовили для своих учеников вопросники, призванные выявить глубину знаний и «специализацию» ума (а что это, как не тестирование в современном понимании). В Средние века тестирование было не в чести. Это явление возродилось лишь в конце XIX века, когда зародилась и стала развиваться наука о психологии человека.
Есть информация, что тестирование на способности человека проводилось среди чиновников Китайской империи еще две тысячи лет назад. В Древней Греции философы готовили для своих учеников вопросники, призванные выявить глубину знаний и «специализацию» ума (а что это, как не тестирование в современном понимании). В Средние века тестирование было не в чести. Это явление возродилось лишь в конце XIX века, когда зародилась и стала развиваться наука о психологии человека.
Определи свой психотип
Изначально научные изыскания в этом направлении проводились лишь для использования при лечении душевнобольных. Однако уже к 1930-м годам психологическое тестирование стало использоваться все шире. Большой вклад в создание многих знакомых нам сегодня тестов внес немецкий врач Альфред Адлер.
Противник теории Зигмунда Фрейда о «Бессознательном Я», А. Адлер продвигал идею о том, в основе человеческого общения лежит чувство коллективизма.
Если коллективизм хорошо развит в человеке, то тот с легкостью будет находить общий язык с окружающими и никогда не станет неврастеником, способным на необдуманные и дикие поступки, – считал немец.

Отвечай быстро и правдиво!
Альфред Адлер дал толчок к разработке ряда интересных психологических тестов, выявляющих различные невротические состояния и психотип человека. Предлагаем вам пройти бесплатные тесты, которые займут от 2 до 10 минут вашего времени.
- Диагностика «Ваш психотип»
- Диагностика «Какая вы личность»
Оптимист или пессимист
Иногда для определения черт своего характера не обязательно отвечать на вопросы, достаточно просто рассказать, что вы видите. Психологические тесты в картинках – очень популярный вид как среди психологов-профессионалов, так и среди обывателей.
Что ты видишь?
В основу тестирования картинками положены оптические иллюзии. В таких тестах также нельзя медлить, следует называть первую ассоциацию, пришедшую в голову. Тест «Кляксы Роршаха» расскажет о вашем психическом состоянии. Второй включен в статью больше для развлечения и дает общее определение психотипа.
- Задание «Кляксы Роршаха»
- Задание «Ваш взгляд на жизнь»
Проекция
Один из видов тестов с картинками – проективные опросники. Они рассказывают об основных чертах вашей личности, основываясь на сделанном вами выборе изображений или описаний изображений. Предлагаем вашему вниманию два самых распространенных проективных теста.
Они рассказывают об основных чертах вашей личности, основываясь на сделанном вами выборе изображений или описаний изображений. Предлагаем вашему вниманию два самых распространенных проективных теста.
- Диагностика «Картинки Маркерта»
- Диагностика «Опросник Пальмера»
- Диагностика «Куб»
Реалист или идеалист
Течение нашей жизни зависит от ежедневных решений и общего настроя. Как вы смотрите на окружающий мир: через «розовые очки» или сумрак неприятия? Разобраться с этим вопросом помогают психологические тесты с ответами.
Выбирай понравившийся
Каждая личность многогранная и разносторонняя. Но в основе лежит первичное отношение к миру. Идеализируешь ты происходящее вокруг или сгущаешь краски? От этого зависит твоя позиция в мире.
- Задание «Разум или чувства?»
- Задание «Лидер или ведомый?»
- Задание «Уверен ли ты в себе?»
Прохождение психологического тестирования – это не только развлечение, но и реальная возможность узнать о себе что-то новое. Самотестирование помогает посмотреть на себя с новой, порой неожиданной стороны, и решительно выйти за рамки зоны комфорта, которые не только оберегают нас от потрясений, но также и мешают развиваться. Пройдите понравившиеся тесты и убедитесь в этом сами.
Самотестирование помогает посмотреть на себя с новой, порой неожиданной стороны, и решительно выйти за рамки зоны комфорта, которые не только оберегают нас от потрясений, но также и мешают развиваться. Пройдите понравившиеся тесты и убедитесь в этом сами.
Желаем вам интересного времяпровождения!
Психологическое тестирование — термин психологии, обозначающий процедуру установления и измерения индивидуально-психологических отличий. В отечественной психоло
2. Понятие «психологическое тестирование»
С появлением первых тестов наиболее употребляемым термином, с помощью которого обозначается измерение индивидуально-психологических особенностей, стал термин «психологическое тестирование». Первоначально термин «психологическое тестирование» использовался широко, включая в себя любое измерение в психологической науке. По мере развития тестов, сфера психологического тестирования сузилась до измерения личностных и когнитивных особенностей. Термин «психодиагностика» впервые озвучил в 1921 году Г. Роршах, назвав так процесс обследования с помощью созданного им «теста чернильных пятен», названного позже тестом Роршаха. Далее термин «психодиагностика» использовался как синоним термина «психологическое тестирование», постепенно заменяя его употребление. Появление понятия «психодиагностика» связано со становлением проективного подхода, открывающего целостную картину личности, и кризисом психометрических тестов, «раскладывающих» личность испытуемого на отдельные функции. В этот период начинают использоваться достаточно обширные теории проективного подхода, разрабатываемые психоаналитическими авторами. Длительное время понятие «психодиагностика» отождествляется с проективными тестами, и используется в работах немецких и швейцарских психологов. В научной литературе США продолжает развиваться понятие «психологическое тестирование» вплоть до 1970-х годов, и обозначает все то, что связано с разработкой и применением любых психологических тестов.
По мере развития тестов, сфера психологического тестирования сузилась до измерения личностных и когнитивных особенностей. Термин «психодиагностика» впервые озвучил в 1921 году Г. Роршах, назвав так процесс обследования с помощью созданного им «теста чернильных пятен», названного позже тестом Роршаха. Далее термин «психодиагностика» использовался как синоним термина «психологическое тестирование», постепенно заменяя его употребление. Появление понятия «психодиагностика» связано со становлением проективного подхода, открывающего целостную картину личности, и кризисом психометрических тестов, «раскладывающих» личность испытуемого на отдельные функции. В этот период начинают использоваться достаточно обширные теории проективного подхода, разрабатываемые психоаналитическими авторами. Длительное время понятие «психодиагностика» отождествляется с проективными тестами, и используется в работах немецких и швейцарских психологов. В научной литературе США продолжает развиваться понятие «психологическое тестирование» вплоть до 1970-х годов, и обозначает все то, что связано с разработкой и применением любых психологических тестов. За этот период публикуется большое количество исследований по истории психологического тестирования, постепенно термин «психодиагностика» вытесняется из употребления.
За этот период публикуется большое количество исследований по истории психологического тестирования, постепенно термин «психодиагностика» вытесняется из употребления.
Вышеописанные обстоятельства свидетельствуют о любопытном феномене, связанном с развитием области исследований по измерению индивидуально-психологических различий и отсутствием должного названия этой области, так как термин «психологическое тестирование» пригодный скорее для обозначения процесса применения тестов, но не области науки.
В 70-х годах 20 столетия в области индивидуальных различий на территории стран Западной Европы и США вместо термина «психологическое тестирование» все чаще применяется понятие — психологическая оценка psychological assessment.
На территории России благодаря усилиям Б. Г. Ананьева, возглавляющего в 1960-х годах Ленинградскую психологическую школу, описанное направление исследований получило название «психологическая диагностика».
В первом советском учебном пособии по психодиагностике под редакцией А. А. Бодалева и В. В. Столина в 1987 году описанная отрасль психологических знаний — «это наука и практика постановки психологического диагноза».
Как проективные тесты используются для измерения личности
Проективный тест — это тип личностного теста, в котором вы предлагаете ответы на неоднозначные сцены, слова или изображения. Цель таких тестов — выявить скрытые конфликты или эмоции, которые вы проецируете на тест в надежде, что эти проблемы затем можно решить с помощью психотерапии или других подходящих методов лечения.
Истоки проективных тестов
Этот тип теста появился в психоаналитической школе мысли, которая предполагала, что у людей есть бессознательные мысли или побуждения.Проективные тесты предназначены для выявления чувств, желаний и конфликтов, которые скрыты от сознательного понимания.
Интерпретируя ответы на неоднозначные сигналы, психоаналитики надеются раскрыть подсознательные чувства, которые могут вызывать проблемы в жизни человека.
Обучение проективному тестированию в условиях выпускников психологических факультетов резко сократилось за последнее десятилетие или около того. Несмотря на разногласия по поводу их использования, проективные тесты остаются довольно популярными и широко используются как в клинической, так и в судебной медицине.
По крайней мере, один проективный тест был отмечен как один из пяти лучших тестов, используемых на практике для 50% из 28 глобальных исследований, основанных на опросах.
Как работают проективные тесты
Во многих проективных тестах людям показывают неоднозначное изображение, а затем просят дать первый ответ, который приходит на ум. Ключ к проективным тестам — неоднозначность стимулов.
Согласно теории, лежащей в основе таких тестов, использование четко определенных вопросов может привести к ответам, которые тщательно продумываются сознанием.Когда вам задают простой вопрос по определенной теме, вы должны потратить время на сознательное создание ответа.
Это может привести к предвзятости и даже неправде вне зависимости от того, пытаетесь вы обмануть поставщика тестов. Например, респондент может давать ответы, которые воспринимаются как более социально приемлемые или желательные, но, возможно, не являются наиболее точным отражением их истинных чувств или поведения.
Предоставляя вам непонятный вопрос или стимул, выявляются ваши скрытые и бессознательные мотивы или установки.
Есть надежда, что из-за неоднозначного характера вопросов люди могут быть менее способны полагаться на возможные подсказки о том, что, по их мнению, ожидает увидеть тестировщик. В результате они, надеюсь, меньше склонны «притворяться хорошими» или выглядеть хорошо.
Виды проективных тестов
Есть несколько различных типов проективных тестов. Некоторые из наиболее известных примеров включают:
Тест Роршаха с чернильными пятнами
Этот тест был одним из первых разработанных проективных тестов и продолжает оставаться одним из самых известных и широко используемых. Тест, разработанный швейцарским психиатром Германом Роршахом в 1921 году, состоит из 10 различных карточек, на которых изображены неоднозначные чернильные пятна.
Тест, разработанный швейцарским психиатром Германом Роршахом в 1921 году, состоит из 10 различных карточек, на которых изображены неоднозначные чернильные пятна.
Людям показывают по одной карточке и просят описать то, что они видят на картинке. Ответы дословно записываются тестером. Также отмечаются жесты, тон голоса и другие реакции.
Результаты теста могут отличаться в зависимости от того, какую из многих существующих систем выставления оценок использует экзаменатор.
Тематический тест апперцепции (TAT)
В тесте ТАТ людей просят посмотреть серию неоднозначных сцен, а затем рассказать историю, описывающую сцену.Сюда входит описание того, что происходит, что чувствуют персонажи и чем закончится история.
Затем экзаменатор оценивает тест на основе потребностей, мотиваций и тревог главного героя, а также того, как в конечном итоге повернется история.
Тест на рисование человека
Этот тип проективного теста включает в себя именно то, что вы можете себе представить. Люди рисуют человека, а созданный ими образ оценивается экспертом.
Люди рисуют человека, а созданный ими образ оценивается экспертом.
Чтобы оценить тест, интерпретатор теста может учитывать ряд факторов.Они могут включать в себя размер отдельных частей тела или функций, уровень детализации рисунка, а также общую форму рисунка.
Как и другие проективные тесты, тест «Нарисуй человека» подвергся критике за его недостаточную валидность.
Интерпретатор-тестировщик может предположить, что определенные аспекты рисунка указывают на определенные психологические тенденции. Однако это может просто означать, что у человека плохие навыки рисования.
Этот тест использовался в качестве меры интеллекта у детей, но исследование, сравнивающее результаты по дошкольной и начальной шкале интеллекта Векслера с тестом «Нарисуй человека», обнаружило очень низкую корреляцию между двумя оценками.Взаимодействие с другими людьми
Тест дом-дерево-человек
В этом типе проективного теста людей просят нарисовать дом, дерево и человека. После завершения рисования им задают ряд вопросов о нарисованных ими изображениях.
После завершения рисования им задают ряд вопросов о нарисованных ими изображениях.
Первоначально тест был разработан Джоном Баком и включал серию из 60 вопросов, которые нужно было задать респонденту, хотя администраторы теста также могут придумывать свои собственные вопросы или дополнительные запросы для дальнейшего изучения ответов испытуемого.Например, администратор теста может спросить у чертежа дома:
- Кто здесь живет?
- Кто посещает человека, который здесь живет?
- Счастлив ли живущий здесь человек?
Слабые стороны
Проективные тесты чаще всего используются в терапевтических целях. Во многих случаях терапевты используют эти тесты для получения качественной информации о людях.
Некоторые терапевты могут использовать проективные тесты как своего рода ледокол, чтобы побудить людей обсуждать проблемы или исследовать свои мысли и эмоции.
Хотя проективные тесты имеют некоторые преимущества, они также имеют ряд недостатков и ограничений, в том числе:
- Проективные тесты, не имеющие стандартной шкалы оценок, как правило, не имеют ни валидности, ни надежности.
 Валидность относится к тому, измеряет ли тест то, что он должен измерять, в то время как надежность относится к согласованности результатов теста.
Валидность относится к тому, измеряет ли тест то, что он должен измерять, в то время как надежность относится к согласованности результатов теста. - Оценка проективных тестов очень субъективна, поэтому интерпретация ответов может сильно различаться от одного экзаменатора к другому.
- На ответы респондента может сильно повлиять отношение экзаменатора или настройки теста.
проективных тестов. Совершенно тривиально? | Александра G | Psyc 406–2015
Совершенно тривиально?
«Старик делает ребенку тест Роршаха».
На самом деле это очень разумный ответ. Проективные тесты, подобные описанной выше задаче Роршаха, не без оснований стали предметом многочисленных споров с момента их разработки.Приводились слова А. Р. Дженсена: «… скорость научного прогресса в клинической психологии вполне может быть измерена скоростью и тщательностью, с которой он преодолевает оценку Роршаха». (Лилиенфельд, Вуд и Гарб, 2000).
Проективный тест определяется как тест, в котором участника просят ответить на неоднозначные стимулы, и нет правильных или неправильных ответов. Считается, что люди структурируют или интерпретируют неоднозначный стимул таким образом, чтобы отражать их бессознательные мысли, убеждения, потребности или желания.После этого ответы анализируются на предмет смысла (Университет Альберты). Эти тесты разработаны на основе психоаналитических традиций и, как считалось, имеют ряд преимуществ. Сюда входило снижение соблазна давать ложные ответы, поскольку никакой ответ не был по своей сути правильным или неправильным. Тесты практически не требовали устных навыков. Говорят, что они выявили как сознательные, так и бессознательные черты характера. Наконец, они сосредоточились на клинической перспективе, а не на нормативной (Северо-восточный университет Иллинойса).
Считается, что люди структурируют или интерпретируют неоднозначный стимул таким образом, чтобы отражать их бессознательные мысли, убеждения, потребности или желания.После этого ответы анализируются на предмет смысла (Университет Альберты). Эти тесты разработаны на основе психоаналитических традиций и, как считалось, имеют ряд преимуществ. Сюда входило снижение соблазна давать ложные ответы, поскольку никакой ответ не был по своей сути правильным или неправильным. Тесты практически не требовали устных навыков. Говорят, что они выявили как сознательные, так и бессознательные черты характера. Наконец, они сосредоточились на клинической перспективе, а не на нормативной (Северо-восточный университет Иллинойса).
Однако именно внутренняя субъективность стимула, ответов и интерпретаций этих ответов заставила психологов сегодня отвернуться от таких методов проективного тестирования, хотя они еще не устарели. Некоторые тесты все еще существуют сегодня и все еще используются в клинической практике, особенно в США (Lillienfeld et al. , 2000). Некоторые из наиболее распространенных тестов включают в себя задачу Роршаха с чернильными пятнами, тест тематической апперцепции, тест дом-дерево-человек и тест на рисование человека.
, 2000). Некоторые из наиболее распространенных тестов включают в себя задачу Роршаха с чернильными пятнами, тест тематической апперцепции, тест дом-дерево-человек и тест на рисование человека.
Тематический тест апперцепции, тест «Дом-дерево-человек», тест «Нарисуй человека» и многие другие. У них есть общие весьма неоднозначные стимулы, такие как те, что проиллюстрированы здесь чернильным пятном Роршаха и ситуацией, взятой из тематического теста апперцепции.
Тематический тест апперцепцииИз изображений тестов «Дом-дерево-человек» и теста «Нарисуй человека» видно, что ответы одинаково неоднозначны. Конечно, возникает вопрос, как оцениваются такие тесты, и возможно ли, чтобы такие меры были надежными и действительными, несмотря на их очевидную субъективность?
Тест «Дом-Дерево-Человек» Подробный обзор существующих тестов, проведенный Lillienfeld et al.(2000) обнаружили, что только очень небольшое количество индексов, полученных из задачи Роршаха и тематической апперцепции, показало какую-либо валидность, и что доказательств валидности было еще меньше для тестов рисования.
Кроме того, они провели метаанализ, в котором сравнили способность этих трех типов проективных тестов выявлять сексуальное насилие над детьми. Исследователи обнаружили, что ни один из результатов не может быть воспроизведен независимыми следственными группами (Lillienfeld, 2000).
Таким образом, нам кажется, что нам следует ошибиться в сторону осторожности и, возможно, как девушка в мультфильме в начале этой части, по-прежнему скептически относиться к надежности и валидности проективных тестов. В конце концов, привнесение такой субъективности в психологическое измерение не может дать сильного инструмента оценки.0
(PDF) Обоснованность проективных рисунков в клинической практике.
Ссылки
не требует слов. Остер также отмечает: «Было обнаружено, что графические изображения открывают безграничное количество возможностей
для выявления значительных психических препятствий» (стр.4), и он утверждает, что чертежи могут также помочь клиентам измениться и по-другому взглянуть на свои проблемы.
Остер также старается отличать проективные рисунки от арт-терапии двумя основными способами: во-первых, с помощью обычных инструментов для создания рисунков, а во-вторых,
, подчеркивая, что использование рисунков для сбора данных не является основным компонент терапии
. Все оценки рисования, описанные в его книге, можно сделать с помощью бумаги и карандаша
.Он отмечает, что использование этих простых инструментов для рисования отличает работу от
«профессий арт-терапии, которые имеют гораздо более значительный опыт работы в области искусства
и используют множество материалов, которые обычно не подходят для других людей с поведенческим здоровьем.
дисциплин. . .. »(стр. Xv). Проективные рисунки в его книге легко использовать для врачей
, которым не хватает художественного опыта и / или опыта арт-терапии. Кроме того, Остер подчеркивает
, используя проективные рисунки для сбора информации, чтобы усилить терапевтический альянс для
менее вербальных клиентов.

Проективные рисунки подверглись большой критике в последние несколько лет (Groth-Marnat,
2009; Kaplan, 2012). Критики включали вопросы о достоверности проективных рисунков, отсутствии методов оценки
, ограниченной прогностической полезности, отсутствии стандартизации в администрировании
, переменной межэкспертной надежности и чрезмерном упоре на психоаналитическую перспективу
в анализе (Groth-Marnat, 2009; Lilienfeld et al., 2000). Грот-Марнат (2009)
отмечает, что проективные оценки могут быть более устойчивыми к фальсификации, предлагают информацию о
подсознательных мыслях и чувствах клиента и дают общую оценку личности
; однако Грот-Марнат больше не включает информацию о проекционных рисунках
в свой Справочник по психологической оценке.
Напротив, Остер отмечает, что рисунок дерева может измерять общую психопатологию,
отличать психиатрических пациентов от контрольной и указывать на травму. Каплан (2012) и
Остер соглашаются, что рисунки детей могут дать приблизительную оценку уровня когнитивного развития
, хотя Остер отмечает, что рисунки, как правило, предсказывают IQ немного ниже, чем
, полученный с помощью стандартизированных тестов. Lilienfeld et al. (2000) отмечают, что глобальная оценка
Lilienfeld et al. (2000) отмечают, что глобальная оценка
человека, нарисованного на рисунке, может указывать на психопатологию, и этот показатель может быть увеличен на
с использованием схемы оценки Коппитца.
Остер действительно включает определенные «маркеры» личности, и он дает некоторую поддержку этим выводам
. Однако использование «маркеров» проективного рисования в качестве индикаторов личности в клинической практике
не было поддержано рядом исследователей (Groth-Marnat, 2009; Lilienfeld
et al., 2000; Kaplan, 2012). Несмотря на эти ограничения, чертежи можно использовать по всем причинам
, упомянутым выше. «Правильное» использование проективных рисунков в клинической практике:
: усиление связи с невербальными или стойкими клиентами, обращение к клиенту менее инвазивным способом,
, помощь в изучении темы с клиентом и глобальная оценка личности или функционирует.Oster предоставляет множество задач по рисованию, которые будут полезны
врачам, которые хотят связаться с клиентами и помочь в сборе данных для информирования о лечении.
Грот-Марнат, Г. (2009). Справочник психологической оценки. Хобокен, Нью-Джерси: Уайли.
PsycINFO →
Коаксиальная проективная система визуализации для хирургической навигации и телементоринга
1.
Введение
Несмотря на последние достижения хирургической науки, дальнейшему распространению современных хирургических методов, влияющих на здоровье и благополучие человека, препятствует неравенство в сфере здравоохранения, особенно среди социально незащищенных слоев населения, которые могут иметь лишь ограниченные ресурсы. 1 Возникающая область телемедицины может преодолеть такое неравенство за счет приближения персонализированного медицинского и хирургического опыта к пациентам в слаборазвитых регионах или изолированных местах. 2 — 4 Если в таких условиях требуется неотложная помощь, телемедицинский инструмент может помочь медицинскому специалисту направить хирургическое вмешательство, когда у персонала на месте нет соответствующего опыта или нет. 5 , 6 Кроме того, инструмент телемедицины может помочь в образовательной среде, позволяя опытному хирургу обучать сложным хирургическим процедурам в интерактивном режиме, который может превосходить традиционные образовательные инструменты, такие как видеоконференцсвязь. 7 , 8 Используя инструмент телемедицины, менее опытный хирург на месте операции может совместно использовать одно и то же поле зрения со специалистом-хирургом в удаленном месте, что обеспечивает интерактивную передачу знаний и беспрепятственное принятие решений , и проинструктированное вмешательство без дистанционного барьера. 9 , 10
5 , 6 Кроме того, инструмент телемедицины может помочь в образовательной среде, позволяя опытному хирургу обучать сложным хирургическим процедурам в интерактивном режиме, который может превосходить традиционные образовательные инструменты, такие как видеоконференцсвязь. 7 , 8 Используя инструмент телемедицины, менее опытный хирург на месте операции может совместно использовать одно и то же поле зрения со специалистом-хирургом в удаленном месте, что обеспечивает интерактивную передачу знаний и беспрепятственное принятие решений , и проинструктированное вмешательство без дистанционного барьера. 9 , 10
Хирургический телементоринг использует телекоммуникационные технологии для предоставления интерактивных рекомендаций и технической помощи оперирующим хирургам на расстоянии. 11 , 12 С момента первой клинической демонстрации хирургии на открытом сердце под управлением видеоконференцсвязи в 1962 году, 7 различные телекоммуникационные инструменты и системы дополненной реальности были протестированы клинически для хирургического телементора.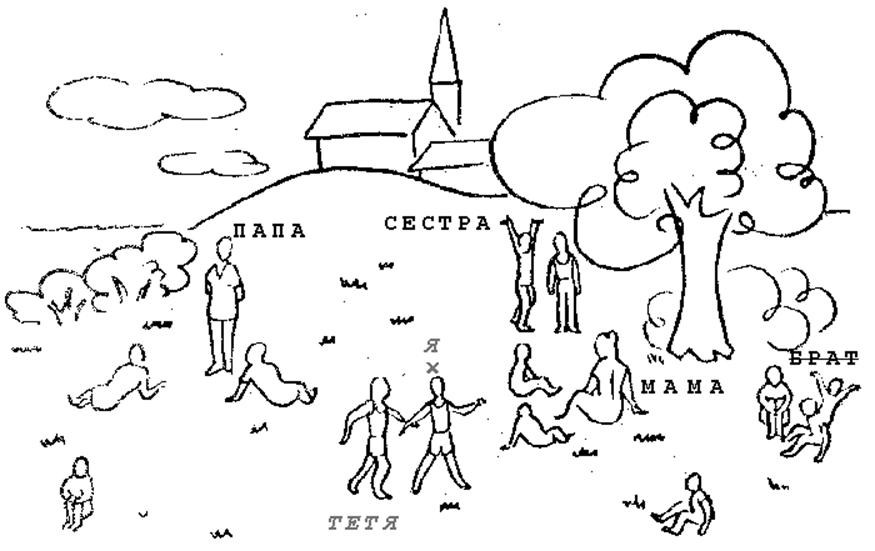 Шенай и др. 13 успешно продемонстрировал систему виртуального интерактивного присутствия и дополненной реальности (VIPAR) при эндартерэктомии трупной сонной артерии и краниотомии. Андерсен и др. 14 разработали и внедрили STAR, систему для телементоринга с дополненной реальностью, которая использовала виртуальный прозрачный дисплей для передачи хирургу-стажеру точного местоположения в операционном поле.Кроме того, были изучены различные носимые устройства, такие как шлемы и очки, для хирургической навигации и телементоринга. 15 , 16 Однако предыдущие хирургические системы навигации и телементоринга имеют различные ограничения, которые препятствуют их широкому клиническому применению. 17 В частности, многие системы телементоринга используют монитор для отображения хирургических изображений и инструкций. Во время хирургического вмешательства с дистанционным управлением оперирующий хирург должен переключать свое поле зрения между операционным полем и монитором, чтобы следовать инструкциям.
Шенай и др. 13 успешно продемонстрировал систему виртуального интерактивного присутствия и дополненной реальности (VIPAR) при эндартерэктомии трупной сонной артерии и краниотомии. Андерсен и др. 14 разработали и внедрили STAR, систему для телементоринга с дополненной реальностью, которая использовала виртуальный прозрачный дисплей для передачи хирургу-стажеру точного местоположения в операционном поле.Кроме того, были изучены различные носимые устройства, такие как шлемы и очки, для хирургической навигации и телементоринга. 15 , 16 Однако предыдущие хирургические системы навигации и телементоринга имеют различные ограничения, которые препятствуют их широкому клиническому применению. 17 В частности, многие системы телементоринга используют монитор для отображения хирургических изображений и инструкций. Во время хирургического вмешательства с дистанционным управлением оперирующий хирург должен переключать свое поле зрения между операционным полем и монитором, чтобы следовать инструкциям. Этот режим работы может не только тратить драгоценное хирургическое время, но и вызывать возможные ошибки из-за несоответствия между операционным полем и дисплеем монитора. Носимые навигационные системы имеют другие ограничения, такие как низкое разрешение, плохая регистрация, ограниченное поле зрения (FOV), блокировка естественного зрения, короткое время автономной работы и перегрев. Таким образом, современные методы телементоринга все еще неоптимальны и не могут быть широко использованы для хирургических приложений с телеуправлением.
Этот режим работы может не только тратить драгоценное хирургическое время, но и вызывать возможные ошибки из-за несоответствия между операционным полем и дисплеем монитора. Носимые навигационные системы имеют другие ограничения, такие как низкое разрешение, плохая регистрация, ограниченное поле зрения (FOV), блокировка естественного зрения, короткое время автономной работы и перегрев. Таким образом, современные методы телементоринга все еще неоптимальны и не могут быть широко использованы для хирургических приложений с телеуправлением.
Чтобы преодолеть вышеупомянутые ограничения и облегчить более широкое клиническое внедрение хирургии с телеуправлением, мы предлагаем систему проективного телементоринга и хирургической навигации.Как показано на рис. 1, система состоит из локального сайта и удаленного сайта, подключенных через беспроводную сеть. На локальном участке хирургическая сцена снимается коаксиальным модулем проективной визуализации (CPI-1), обрабатывается компьютером и передается по беспроводной сети на удаленный участок. В удаленном месте изображения хирургической сцены, передаваемые по беспроводной сети, отображаются в реальном времени на портативном устройстве отображения (например, компьютере, планшете или мобильном телефоне), чтобы хирург мог принимать важные медицинские решения и предоставить интерактивные инструкции.Аннотированные инструкции специалиста будут переданы обратно и спроецированы на место операции, чтобы с высокой точностью направить менее опытный медицинский персонал о соответствующих вмешательствах. Насколько нам известно, это первый отчет о проективной системе телементоринга и хирургической навигации и первая демонстрация ее клинической применимости как на настольных моделях, так и на моделях in vivo .
В удаленном месте изображения хирургической сцены, передаваемые по беспроводной сети, отображаются в реальном времени на портативном устройстве отображения (например, компьютере, планшете или мобильном телефоне), чтобы хирург мог принимать важные медицинские решения и предоставить интерактивные инструкции.Аннотированные инструкции специалиста будут переданы обратно и спроецированы на место операции, чтобы с высокой точностью направить менее опытный медицинский персонал о соответствующих вмешательствах. Насколько нам известно, это первый отчет о проективной системе телементоринга и хирургической навигации и первая демонстрация ее клинической применимости как на настольных моделях, так и на моделях in vivo .
Рис. 1
Принципиальная схема предлагаемой системы проективного телементоринга и хирургической навигации.
2.
Материалы и методы
2.1.
Материалы
Ключевым компонентом предлагаемой проективной системы телементоринга и хирургической навигации является коаксиальный проективный модуль визуализации CPI-1, который способен одновременно получать изображения хирургической сцены и отображать аннотации на месте операции.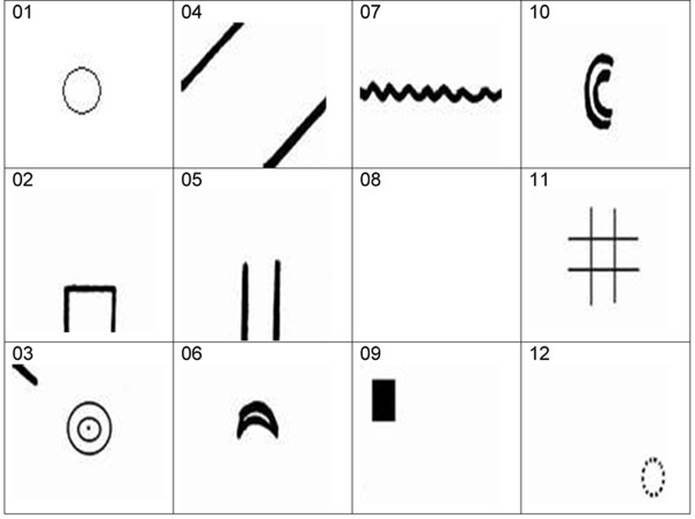 Модуль CPI-1 состоит из цветной камеры с зарядовой связью (CCD) MV-GED130C-T (MindVision, Шэньчжэнь, Китай), проектора PRO4500VIS700 (Wintech, Шанхай, Китай), 532-нм NF-25C05-40 -532 режекторный фильтр (OptoSigma Corporation, Япония) и полосовой фильтр 530 нм (Zhaojiu Photoelectric, Шанхай, Китай), а также светоделитель (Nano Macro Photonics, Шэньчжэнь, Китай), как показано на рис.2 (а). В нашей предыдущей конструкции проекционного формирователя изображений ПЗС-камера и проектор размещены рядом, создавая несогласованные поля зрения, которые необходимо калибровать на разных рабочих расстояниях. 18 Чтобы устранить такую ошибку совместной регистрации между полученным и проецируемым изображениями, мы предлагаем конструкцию коаксиального оптического тракта, как показано на рис. 2 (b). В этой конструкции изображение хирургической сцены отражается светоделителем и снимается камерой CCD, а аннотации, передаваемые по беспроводной сети, передаются через светоделитель и проецируются на ту же операционную сцену с точной регистрацией независимо от любых изменений рабочего расстояния.
Модуль CPI-1 состоит из цветной камеры с зарядовой связью (CCD) MV-GED130C-T (MindVision, Шэньчжэнь, Китай), проектора PRO4500VIS700 (Wintech, Шанхай, Китай), 532-нм NF-25C05-40 -532 режекторный фильтр (OptoSigma Corporation, Япония) и полосовой фильтр 530 нм (Zhaojiu Photoelectric, Шанхай, Китай), а также светоделитель (Nano Macro Photonics, Шэньчжэнь, Китай), как показано на рис.2 (а). В нашей предыдущей конструкции проекционного формирователя изображений ПЗС-камера и проектор размещены рядом, создавая несогласованные поля зрения, которые необходимо калибровать на разных рабочих расстояниях. 18 Чтобы устранить такую ошибку совместной регистрации между полученным и проецируемым изображениями, мы предлагаем конструкцию коаксиального оптического тракта, как показано на рис. 2 (b). В этой конструкции изображение хирургической сцены отражается светоделителем и снимается камерой CCD, а аннотации, передаваемые по беспроводной сети, передаются через светоделитель и проецируются на ту же операционную сцену с точной регистрацией независимо от любых изменений рабочего расстояния. .Чтобы избежать интерференции проецируемых аннотаций с изображениями хирургической сцены, полученными камерой CCD, полосовой фильтр 530 нм и режекторный фильтр 532 нм помещаются на кронштейн проектора и кронштейн камеры коаксиального оптического тракта соответственно. . При такой конструкции проецируемые аннотации на операционном поле не будут влиять на изображения хирургической сцены, полученные камерой CCD. Камера CCD имеет чип-сенсор размером 1/3 дюйма, динамический диапазон 12 бит, частоту кадров около 30 кадров в секунду и разрешение 1280 × 960.Объектив с постоянным фокусным расстоянием с фокусным расстоянием 12 мм устанавливается на камеру, чтобы получить поле обзора 220 мм × 160 мм для хирургической навигации на рабочем расстоянии 300 мм. Режекторный фильтр 532 нм перед камерой CCD закреплен на откидном креплении, которое свободно доступно в диапазоне от 0 до 90 градусов, что позволяет нам включать и выключать режекторный фильтр для различных задач получения изображения или цветокоррекции.
.Чтобы избежать интерференции проецируемых аннотаций с изображениями хирургической сцены, полученными камерой CCD, полосовой фильтр 530 нм и режекторный фильтр 532 нм помещаются на кронштейн проектора и кронштейн камеры коаксиального оптического тракта соответственно. . При такой конструкции проецируемые аннотации на операционном поле не будут влиять на изображения хирургической сцены, полученные камерой CCD. Камера CCD имеет чип-сенсор размером 1/3 дюйма, динамический диапазон 12 бит, частоту кадров около 30 кадров в секунду и разрешение 1280 × 960.Объектив с постоянным фокусным расстоянием с фокусным расстоянием 12 мм устанавливается на камеру, чтобы получить поле обзора 220 мм × 160 мм для хирургической навигации на рабочем расстоянии 300 мм. Режекторный фильтр 532 нм перед камерой CCD закреплен на откидном креплении, которое свободно доступно в диапазоне от 0 до 90 градусов, что позволяет нам включать и выключать режекторный фильтр для различных задач получения изображения или цветокоррекции. . Проектор перпендикулярно камере проецирует на операционное поле поучительные аннотации или другие изображения с коэффициентом контрастности 1000: 1 и разрешением 1280 × 800.Полосовой фильтр 530 нм устанавливается перед проектором. Светоделитель с коэффициентом пропускания и отражения 80:20 установлен под углом 45 градусов к оптической оси камеры. Это отношение пропускания к отражению определяется как компромисс между требованиями к оптической интенсивности между проецированием и отображением. Положение и ориентация проектора тщательно совмещены для совпадения проецирования и отображения. Пакет программного обеспечения TeamViewer (TeamViewer GmbH, Геппинген, Германия), соответствующий Закону о переносимости и подотчетности в медицинском страховании 19 , используется для беспроводной передачи данных между локальным и удаленным объектами.На локальном сайте компьютер используется для получения, проецирования и обработки изображений. На удаленном участке портативное устройство отображения используется для отображения операционного поля и инструктивных комментариев.
. Проектор перпендикулярно камере проецирует на операционное поле поучительные аннотации или другие изображения с коэффициентом контрастности 1000: 1 и разрешением 1280 × 800.Полосовой фильтр 530 нм устанавливается перед проектором. Светоделитель с коэффициентом пропускания и отражения 80:20 установлен под углом 45 градусов к оптической оси камеры. Это отношение пропускания к отражению определяется как компромисс между требованиями к оптической интенсивности между проецированием и отображением. Положение и ориентация проектора тщательно совмещены для совпадения проецирования и отображения. Пакет программного обеспечения TeamViewer (TeamViewer GmbH, Геппинген, Германия), соответствующий Закону о переносимости и подотчетности в медицинском страховании 19 , используется для беспроводной передачи данных между локальным и удаленным объектами.На локальном сайте компьютер используется для получения, проецирования и обработки изображений. На удаленном участке портативное устройство отображения используется для отображения операционного поля и инструктивных комментариев.
Рис. 2
Система телементоринга и хирургической навигации на локальном объекте. (а) Настройка системы. (б) Принципиальная схема модуля CPI-1.
2.2.
Алгоритм цветовой коррекции
Для облегчения принятия эффективных решений и инструктивных комментариев хирургическим специалистом в удаленном месте предпочтение отдается отображению хирургической сцены в реальном цвете.Однако из-за использования режекторного фильтра 532 нм на кронштейне камеры модуля CPI-1 изображения операционного поля, полученные камерой CCD, не имеют цветовой составляющей при 532 нм. Другими словами, зеленый канал намного слабее двух других. Следовательно, требуется цветокоррекция, чтобы восстановить истинный цвет хирургической сцены.
Наш алгоритм цветокоррекции применяется к цветному изображению RGB с помощью матрицы преобразования. Обычный метод цветокоррекции — масштабирование красного, зеленого и синего каналов. 20 Поскольку этот метод учитывает эффекты только одного канала, он вызывает определенную ошибку в восстановлении цвета хроматических изображений. Чтобы преодолеть это ограничение, мы модифицируем обычный алгоритм цветокоррекции, вводя несколько цветовых компонентов как
Чтобы преодолеть это ограничение, мы модифицируем обычный алгоритм цветокоррекции, вводя несколько цветовых компонентов как
Eq. (1)
[R G B] ′ = T [R1 G1 B1 R12 G12 B12 R1 G1 R1 B1 G1 B1 1] ′, где T — матрица параметров преобразования 3 × 10; R, G, B — нормализованные значения пикселей в красном, зеленом и синем каналах изображения, захваченного без режекторного фильтра 532 нм; R1 G1 B1 — нормализованные значения пикселей в красном, зеленом и синем каналах изображения, снятого с помощью режекторного фильтра 532 нм. Зеленый канал компенсируется введением карты коррекции цвета, которая имеет 104 разных цвета и четыре круглых маркера по углам. Сначала мы получаем одно изображение цветной карты, которое содержит четыре круглых маркера в его поле зрения с режекторным фильтром, и другое изображение без фильтра. Два изображения автоматически регистрируются по четырем маркерам. Во-вторых, цветовые блоки в одной позиции на двух изображениях автоматически обрезаются. Наконец, матрица преобразования T получается по формуле. (1), где R, G, B — средние значения цвета каждого цветового блока, обрезанного из изображения, снятого без режекторного фильтра, а R1 G1 B1 — средние значения цвета каждого цветового блока, обрезанного из изображения с режекторным фильтром. . Python используется для программирования вышеуказанных задач обработки изображений.
Матрица коррекции T, полученная в результате описанного выше процесса коррекции цвета, используется для восстановления цветов для видеопотоков, полученных камерой CCD с режекторным фильтром. Компьютер в локальном центре отвечает за получение цветных изображений хирургической сцены, коррекцию слабого зеленого канала и передачу исправленных изображений в удаленное место.Между тем, удаленный компьютер получает и отображает изображения хирургической сцены в реальном цвете после цветокоррекции, где опытные хирурги могут делать хирургические аннотации. Аннотации передаются обратно на местный сайт через программное обеспечение TeamViewer и проецируются на хирургическое поле для управляемого хирургического вмешательства
2.
 3.
3.Эксперимент на животных
Дистанционная крикотиротомия на модели кролика используется в качестве подтверждения концепции для демонстрации клинической применимости хирургических вмешательств с телеуправлением.Крикотиротомия — это процедура, направленная на создание проходимости дыхательных путей путем разреза в определенной опасной для жизни ситуации с небольшими осложнениями. 21 Дистанционная интубация трахеи может добавить еще одно измерение к управлению проходимостью дыхательных путей, поскольку позволяет избежать многократных попыток интубации и предотвратить ятрогенные травмы в условиях неотложной помощи. Кроме того, предлагаемая модель удаленной крикотиротомии также представляет собой ценный обучающий инструмент для студентов-медиков по изучению клинической анатомии во время операции. 22
Кролик в возрасте от 6 до 7 недель и весом около 200 г используется для испытаний на животных. Протокол испытаний одобрен Комитетом по уходу за животными и их использованию Китайского университета науки и технологий. Животное анестезируют путем внутрибрюшинного введения уретана (концентрация 20%). После анестезии кролика фиксируют на операционном столе, вытянув четыре конечности и закрепив их медицинскими лентами. Во время наших экспериментов за кроликом наблюдают каждые 5 минут на случай, если наш эксперимент может вызвать дополнительную боль.Модуль CPI-1 устанавливается на 300 мм выше операционного стола для получения изображения и проецирования аннотации на операционном поле. На удаленном участке опытный хирург наблюдает за изображением хирургической сцены, передаваемым по беспроводной сети, и делает поучительные аннотации для удаленного управления крикотиротомией. Аннотации переносятся обратно в местное хирургическое поле и проецируются на операционное поле, чтобы помочь менее опытному хирургу сделать соответствующий разрез.
Животное анестезируют путем внутрибрюшинного введения уретана (концентрация 20%). После анестезии кролика фиксируют на операционном столе, вытянув четыре конечности и закрепив их медицинскими лентами. Во время наших экспериментов за кроликом наблюдают каждые 5 минут на случай, если наш эксперимент может вызвать дополнительную боль.Модуль CPI-1 устанавливается на 300 мм выше операционного стола для получения изображения и проецирования аннотации на операционном поле. На удаленном участке опытный хирург наблюдает за изображением хирургической сцены, передаваемым по беспроводной сети, и делает поучительные аннотации для удаленного управления крикотиротомией. Аннотации переносятся обратно в местное хирургическое поле и проецируются на операционное поле, чтобы помочь менее опытному хирургу сделать соответствующий разрез.
3.
Результаты
3.1.
Точность алгоритма цветовой коррекции
Точность алгоритма цветовой коррекции оценивается путем вычисления евклидова расстояния цветовых различий в нашей проективной системе телементоринга. Евклидово расстояние — это расстояние между двумя цветами в цветовом пространстве, например RGB, Luv и Lab. Международная комиссия по освещению (CIE) выбирает метрику расстояния ΔEab * для обозначения цветового различия в пространстве L * a * b *, а самым последним стандартом оценки является ΔE2000, который решает проблему единообразия восприятия. 23 , 24
Евклидово расстояние — это расстояние между двумя цветами в цветовом пространстве, например RGB, Luv и Lab. Международная комиссия по освещению (CIE) выбирает метрику расстояния ΔEab * для обозначения цветового различия в пространстве L * a * b *, а самым последним стандартом оценки является ΔE2000, который решает проблему единообразия восприятия. 23 , 24
Мы используем стандарт оценки ΔE2000, чтобы проверить точность нашего алгоритма цветокоррекции как на цветовой карте, так и на руке. На рисунке 3 показаны результаты цветокоррекции цветовой карты. Рисунки 3 (a) –3 (c) показывают изображения цветовой карты, снятые с помощью режекторного фильтра, без режекторного фильтра и с режекторным фильтром, но после цветокоррекции, соответственно. Цветовая разница ΔE между фиг. 3 (b) и 3 (c) рассчитывается по формулам разности цветов CIDE2000 25 и отображается на рис.3 (г) в виде гистограммы. Согласно критериям оценки CIDE2000, уровень ΔE между 1 и 2 означает, что только опытный наблюдатель может заметить разницу в цвете. Среднее значение ΔE цветной карты составляет 1,58, что указывает на то, что изображение цветной карты не показывает существенных отличий от исходного изображения после цветокоррекции.
Среднее значение ΔE цветной карты составляет 1,58, что указывает на то, что изображение цветной карты не показывает существенных отличий от исходного изображения после цветокоррекции.
Рис. 3
Результат цветокоррекции цветовой карты. (а) Изображение с режекторным фильтром 532 нм. (б) Изображение без режекторного фильтра 532 нм. (c) Изображение с режекторным фильтром, но после цветокоррекции.(d) Гистограмма ΔE (CIEDE2000) между изображением (b) и изображением (c) после цветокоррекции. Среднее значение ΔE составляет 1,58.
Аналогичным образом мы также проверяем результат цветокоррекции для руки. На рисунках 4 (a) –4 (c) показаны изображения руки, снятые с помощью режекторного фильтра, без режекторного фильтра и с режекторным фильтром, но после цветокоррекции, соответственно. На рис. 4 (d) показана гистограмма цветового различия ΔE между фиг. 4 (б) и 4 (в). Среднее значение ΔE руки равно 1.37, что указывает на то, что изображение руки не показывает существенных отличий от исходного изображения после цветокоррекции.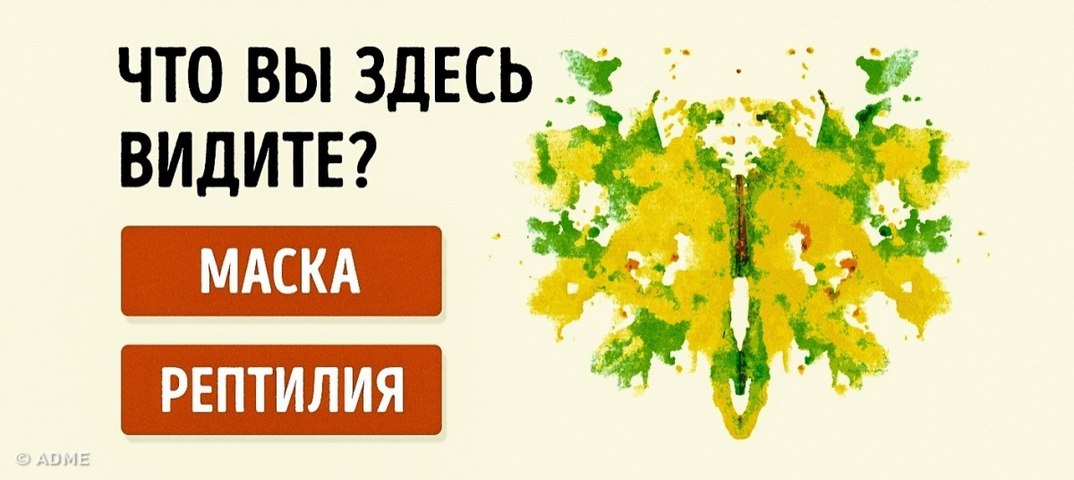
Рис. 4
Результат цветокоррекции руки. (а) Изображение с режекторным фильтром 532 нм. (б) Изображение без режекторного фильтра 532 нм. (c) Изображение с режекторным фильтром, но после цветокоррекции. (d) Гистограмма ΔE (CIEDE2000) между изображением (b) и изображением (c) после цветокоррекции. Среднее значение ΔE составляет 1,37.
3.2.
Цветовая коррекция для удаленного эксперта
На цвет изображения, видимого удаленным экспертом через ПК или планшет, влияют следующие факторы: (1) точность цветокоррекции изображений, полученных на месте хирургического вмешательства, ( 2) сжатие и декомпрессия данных изображения и (3) точность цветного отображения удаленным экспертом через ПК или планшет.Описанный выше алгоритм цветокоррекции откалибровал первый фактор, чтобы обеспечить отображение истинных цветов на месте хирургического вмешательства. Чтобы откалибровать второй фактор, мы передаем изображение 24-цветной карты между двумя городами Китая (Хэфэй и Чанчунь) через режим приоритета качества TeamViewer с разной пропускной способностью (т. Е. 1,15, 9,98 и 21,84 Мбит / с). 26 Все средние значения ΔE (CIEDE2000) меньше 1 при трех полосах пропускания сети, что указывает на отсутствие наблюдаемой разницы в различных сетевых условиях. 24 Дальнейшее исследование показывает, что сжатие и распаковка данных изображения с помощью широко используемого пакета телекоммуникационного программного обеспечения, такого как TeamViewer, не вызовет значительных изменений в цвете изображения, пока пропускная способность сети между двумя местами превышает 1,15 Мбит / с. Что касается третьего фактора, удаленный дисплей должен быть откалиброван по цвету с использованием файла цветокоррекции Международного цветового консорциума (ICC) или инструмента цветокоррекции монитора. Мы решили предоставить клиницистам откалиброванный по цвету экран терминала, чтобы исключить искажение цвета на удаленном дисплее.Цветной дисплей экрана терминала (AOC LV253WQP) сначала калибруется с помощью прибора коррекции цвета дисплея Spyder 4Express и программного пакета коррекции цвета DisplayCAL.
Е. 1,15, 9,98 и 21,84 Мбит / с). 26 Все средние значения ΔE (CIEDE2000) меньше 1 при трех полосах пропускания сети, что указывает на отсутствие наблюдаемой разницы в различных сетевых условиях. 24 Дальнейшее исследование показывает, что сжатие и распаковка данных изображения с помощью широко используемого пакета телекоммуникационного программного обеспечения, такого как TeamViewer, не вызовет значительных изменений в цвете изображения, пока пропускная способность сети между двумя местами превышает 1,15 Мбит / с. Что касается третьего фактора, удаленный дисплей должен быть откалиброван по цвету с использованием файла цветокоррекции Международного цветового консорциума (ICC) или инструмента цветокоррекции монитора. Мы решили предоставить клиницистам откалиброванный по цвету экран терминала, чтобы исключить искажение цвета на удаленном дисплее.Цветной дисплей экрана терминала (AOC LV253WQP) сначала калибруется с помощью прибора коррекции цвета дисплея Spyder 4Express и программного пакета коррекции цвета DisplayCAL. После калибровки оценка цвета выполняется с помощью программного пакета коррекции цвета DisplayCAL. Усредненный уровень ΔE (CIEDE2000) между стандартом и калиброванным 51 цветом составляет 0,46, что указывает на незначительную разницу в цвете на удаленном терминале.
После калибровки оценка цвета выполняется с помощью программного пакета коррекции цвета DisplayCAL. Усредненный уровень ΔE (CIEDE2000) между стандартом и калиброванным 51 цветом составляет 0,46, что указывает на незначительную разницу в цвете на удаленном терминале.
3.3.
Точность системы телементоринга и хирургической навигации
Достижимая точность предлагаемой системы телементоринга проверена в двух лабораторных экспериментах, как показано на рис.5. В первом эксперименте картон размером 175 мм × 135 мм с матрицей белых кругов 9 × 9, напечатанной на черном фоне [рис. 5 (а)] отображается и проецируется обратно на целевой картон. Как исходное, так и проецируемое изображение белых кругов впоследствии снимаются одной и той же камерой. Мы проверили точность проецирования целевого картона на разных рабочих расстояниях (например, от 300 до 500 мм) и под разными углами (например, 0, 30 и 60 градусов), чтобы смоделировать биологическую ткань в разных местах и искривления. Согласно рис. 5 (б) максимальная ошибка проецирования (т.е. сдвиг расстояния между исходным и проецируемым изображениями) составляет менее 0,7 мм для всего поля зрения и для рабочего расстояния от 300 до 500 мм. Согласно рис. 5 (c) максимальная ошибка проецирования (т.е. сдвиг расстояния между исходным и проецируемым изображениями) составляет менее 2 мм для всего поля зрения и для рабочего угла в диапазоне от 0 до 60 градусов.
Согласно рис. 5 (б) максимальная ошибка проецирования (т.е. сдвиг расстояния между исходным и проецируемым изображениями) составляет менее 0,7 мм для всего поля зрения и для рабочего расстояния от 300 до 500 мм. Согласно рис. 5 (c) максимальная ошибка проецирования (т.е. сдвиг расстояния между исходным и проецируемым изображениями) составляет менее 2 мм для всего поля зрения и для рабочего угла в диапазоне от 0 до 60 градусов.
Рис. 5
Результаты оценки точности проецирования.(а) Целевой картон с матрицей белых кругов. (b) Результаты сдвига центрального расстояния между фактическим кругом и проецируемым кругом на различных рабочих расстояниях (т.е. 300, 400 и 500 мм). (c) Результаты сдвига центрального расстояния между фактическим кругом и проецируемым кругом при различных рабочих углах (т. е. 0 °, 30 ° и 60 °). (d) Результаты четырех прямоугольных маркеров, установленных добровольцами для записи четырех угловых положений проецируемого прямоугольника. (e) Максимальные позиционные смещения прямоугольных маркеров, размещенных добровольцами.
Во втором эксперименте прямоугольники разных размеров генерируются компьютером на удаленном участке, передаются обратно и проецируются модулем CPI-1 в пределах операционного поля 220 мм × 160 мм. Добровольцев просят разместить четыре прямоугольных маркера в четырех углах проецируемого изображения, совместив два края маркера с соответствующими краями проецируемого прямоугольника, как показано на рис. 5 (d). Изображение проецируемого прямоугольника и изображение четырех выровненных маркеров получают модулем CPI-1, а координаты четырех угловых точек определяются алгоритмом Харриса – Стивенса. 27 Позиционные отклонения между проецируемым изображением и изображением маркера вычисляются для каждого из четырех углов и отображаются на рис. 5 (e). Согласно фиг. 5 (e), управляемая изображением операция предлагаемой системы телементоринга и хирургической навигации может вызвать позиционную ошибку менее 1 мм как в направлениях X, так и Y.
3.4.
In vivo Демонстрация дистанционной хирургии Клиническая полезность предложенной системы телементоринга продемонстрирована in vivo с использованием крикотиротомии на модели кролика в качестве доказательства концепции. Рисунки 6 (a) и 6 (d) представляют собой изображения, сделанные на удаленном участке и на месте хирургического вмешательства соответственно. На рисунках 6 (b), 6 (e) и 6 (f) показаны рекомендации по расположению начального разреза. На рисунке 6 (b) показана основная аннотация хирургического разреза, сделанная хирургом на удаленном рабочем столе. Рисунок 6 (e) относится к хирургической инструктивной аннотации, наложенной на фактическое хирургическое поле. Рисунок 6 (f) — результат разреза. На рисунках 6 (c), 6 (g) и 6 (h) показана смоделированная хирургическая процедура интубации трахеи во время крикотиротомии.Рисунок 6 (c) относится к аннотации разреза позиции интубации трахеи, нарисованной хирургом на удаленном экране. Между тем, эта аннотация разреза накладывается на операционное поле, как показано на рис. 6 (g), чтобы обеспечить локальное руководство для крикотиротомии. На рисунке 6 (h) показан экспериментальный результат удаленной крикотиротомии. В этой демонстрации оператор без каких-либо знаний клинической анатомии может правильно выполнить процедуру крикотиротомии, следуя дистанционным указаниям опытного специалиста-хирурга.
Рисунки 6 (a) и 6 (d) представляют собой изображения, сделанные на удаленном участке и на месте хирургического вмешательства соответственно. На рисунках 6 (b), 6 (e) и 6 (f) показаны рекомендации по расположению начального разреза. На рисунке 6 (b) показана основная аннотация хирургического разреза, сделанная хирургом на удаленном рабочем столе. Рисунок 6 (e) относится к хирургической инструктивной аннотации, наложенной на фактическое хирургическое поле. Рисунок 6 (f) — результат разреза. На рисунках 6 (c), 6 (g) и 6 (h) показана смоделированная хирургическая процедура интубации трахеи во время крикотиротомии.Рисунок 6 (c) относится к аннотации разреза позиции интубации трахеи, нарисованной хирургом на удаленном экране. Между тем, эта аннотация разреза накладывается на операционное поле, как показано на рис. 6 (g), чтобы обеспечить локальное руководство для крикотиротомии. На рисунке 6 (h) показан экспериментальный результат удаленной крикотиротомии. В этой демонстрации оператор без каких-либо знаний клинической анатомии может правильно выполнить процедуру крикотиротомии, следуя дистанционным указаниям опытного специалиста-хирурга.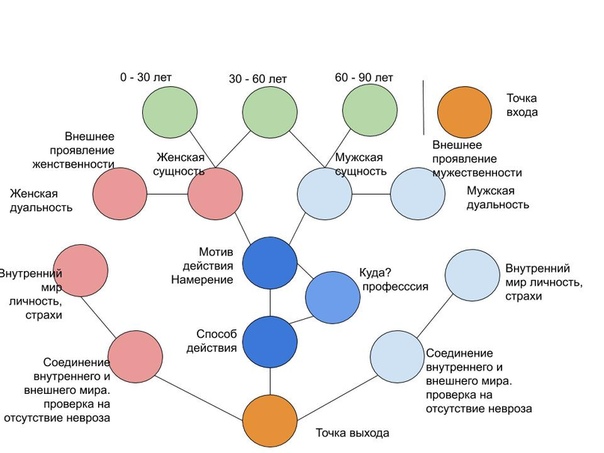
Рис. 6
Операция крикотиротомии на кролике. (а) Общий вид удаленного управления операционным местом. (d) Общий вид операционного поля. Красная стрелка в (b) относится к хирургическому разрезу на удаленном экране, в (e) относится к инструктивной аннотации, наложенной на хирургическое поле, а в (f) относится к результату хирургического разреза, соответственно. Красная стрелка в (c) относится к положению эндотрахеальной интубации на удаленном экране, в (g) относится к инструктивной аннотации, наложенной на хирургическое поле, а в (h) относится к результату крикотиротомии, соответственно.
Помимо хирургии с дистанционным управлением, система проективной визуализации может также использоваться в качестве инструмента телементоринга в медицинском образовании. Как показано на рис. 7 (а), опытный хирург удаленно делает хирургические аннотации и рисует первичные анатомические структуры на сенсорном экране, который отображает хирургическую сцену в реальном времени. На рисунках 7 (b) и 7 (c) показано фактическое окно проекции (то есть операционное поле) до и после наложения инструктивных аннотаций, удаленно предоставленных хирургом-специалистом. Безупречная совместимость аннотаций и хирургической сцены позволяет интерактивно обучать клинической анатомии и хирургическим навыкам без каких-либо дистанционных барьеров.
Безупречная совместимость аннотаций и хирургической сцены позволяет интерактивно обучать клинической анатомии и хирургическим навыкам без каких-либо дистанционных барьеров.
Рис. 7
Интерактивное обучение клинической анатомии с помощью дистанционной хирургии на модели кролика. (a) Сенсорный экран, отображающий операционную сцену и аннотации хирургического специалиста на удаленном участке. (b) Фактическое операционное поле до проецирования аннотаций. (c) Фактическое операционное поле, наложенное на инструктивные аннотации, предоставленные хирургом удаленно.Красные стрелки относятся к инструктивным аннотациям.
4.
Обсуждение
Многие существующие системы телементоринга в открытой хирургии отображают изображения хирургической сцены на отдельном мониторе, и оперирующий хирург должен переключать свое поле зрения между операционным полем и монитором, чтобы следить аннотированные инструкции. Другие системы телементоринга, такие как система DaVinci Surgical, обеспечивают трехмерную (3-D) визуализацию через программу просмотра стереозвука, которая позволяет делать прямые аннотации. 28 Однако стоимость приобретения и обслуживания хирургической системы Da Vinci очень высока, 29 , что делает ее недоступной в регионах с ограниченными ресурсами. Кроме того, телементоринг на основе стереовизитора больше подходит для малоинвазивной хирургии, чем для открытой операции. Впервые мы предлагаем систему телементоринга, специально используемую в открытой хирургии, которая преодолевает текущие хирургические ограничения, проецируя аннотированные инструкции прямо на хирургическое поле с высокой точностью.Такая конструкция телементоринга позволяет оперирующему хирургу сосредоточиться на области хирургии, не отвлекаясь. По сравнению с нашим предыдущим проективным имидж-сканером, который требовал частой калибровки на разных рабочих расстояниях, 18 предлагаемая система выбирает коаксиальный оптический путь, который обеспечивает точную совместимость между полученным и проецируемым изображениями независимо от любых изменений рабочего расстояния. По сравнению с аналогичными хирургическими навигационными устройствами, которые накладывают флуоресцентные изображения в области хирургии, 30 , 31 , мы получаем истинные цветные изображения хирургической сцены и проецируем аннотации в видимой длине волны без помех с помощью специальных фильтров.
28 Однако стоимость приобретения и обслуживания хирургической системы Da Vinci очень высока, 29 , что делает ее недоступной в регионах с ограниченными ресурсами. Кроме того, телементоринг на основе стереовизитора больше подходит для малоинвазивной хирургии, чем для открытой операции. Впервые мы предлагаем систему телементоринга, специально используемую в открытой хирургии, которая преодолевает текущие хирургические ограничения, проецируя аннотированные инструкции прямо на хирургическое поле с высокой точностью.Такая конструкция телементоринга позволяет оперирующему хирургу сосредоточиться на области хирургии, не отвлекаясь. По сравнению с нашим предыдущим проективным имидж-сканером, который требовал частой калибровки на разных рабочих расстояниях, 18 предлагаемая система выбирает коаксиальный оптический путь, который обеспечивает точную совместимость между полученным и проецируемым изображениями независимо от любых изменений рабочего расстояния. По сравнению с аналогичными хирургическими навигационными устройствами, которые накладывают флуоресцентные изображения в области хирургии, 30 , 31 , мы получаем истинные цветные изображения хирургической сцены и проецируем аннотации в видимой длине волны без помех с помощью специальных фильтров.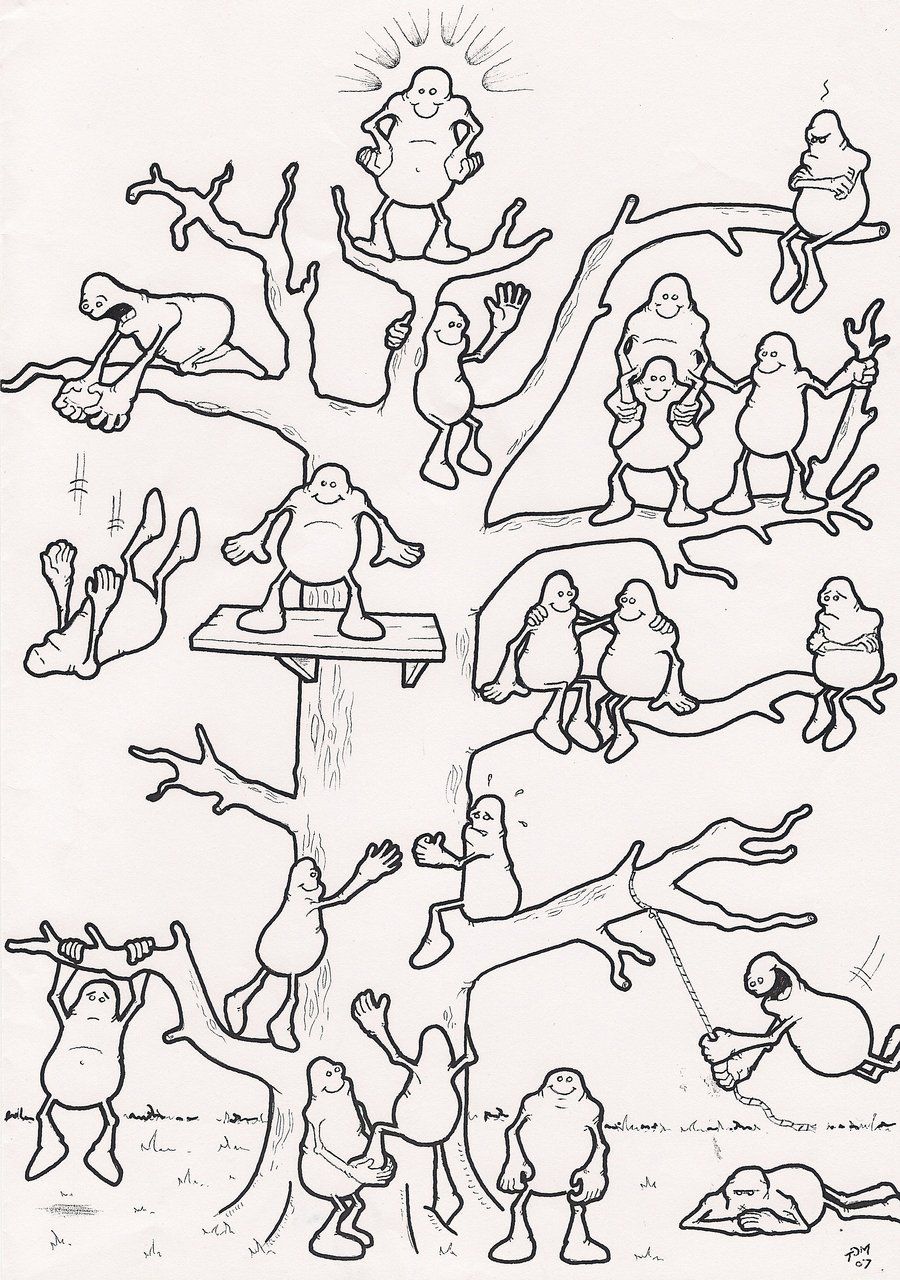 .Алгоритм цветокоррекции разработан для восстановления исходного цвета хирургической сцены для отображения на удаленном участке. Техническая возможность дистанционного вмешательства подтверждена лабораторными экспериментами с точностью позиционирования лучше 1 мм на рабочем расстоянии от 300 до 500 мм. Клиническая полезность крикотиротомии с телеуправлением продемонстрирована на модели кролика in vivo .
.Алгоритм цветокоррекции разработан для восстановления исходного цвета хирургической сцены для отображения на удаленном участке. Техническая возможность дистанционного вмешательства подтверждена лабораторными экспериментами с точностью позиционирования лучше 1 мм на рабочем расстоянии от 300 до 500 мм. Клиническая полезность крикотиротомии с телеуправлением продемонстрирована на модели кролика in vivo .
Хотя на характеристики проекции может влиять изменение глубины трехмерного объекта, есть два параметра, которые мы хотим обсудить.Один — «расфокусировка», а другой — «точность». Проекция станет немного размытой, если часть объекта окажется не в фокусе камеры и проектора. Чтобы компенсировать этот эффект расфокусировки, мы настроили объектив камеры на большее значение f / # (меньшая диафрагма), чтобы увеличить глубину резкости (DOF). Кроме того, чтобы уменьшить эффект расфокусировки со стороны проектора, в будущем будет использоваться проектор на основе лазерного сканирования, чтобы увеличить глубину резкости проектора до «бесконечности». Кроме того, эффект рассеивания биологической ткани также уменьшит визуализированную разницу между изображениями проекции в фокусе и вне фокуса.В текущей конфигурации эффект дефокусировки не вызвал значительных неудобств при проведении экспериментов на кролике. Для точности системы изменение глубины не вызовет дополнительной ошибки проецирования, поскольку текущая конструкция коаксиального оптического пути обеспечивает совпадение оптических осей для камеры и проектора, что приводит к совпадению проецируемого изображения с реальным объектом на разных рабочих расстояниях. .
Кроме того, эффект рассеивания биологической ткани также уменьшит визуализированную разницу между изображениями проекции в фокусе и вне фокуса.В текущей конфигурации эффект дефокусировки не вызвал значительных неудобств при проведении экспериментов на кролике. Для точности системы изменение глубины не вызовет дополнительной ошибки проецирования, поскольку текущая конструкция коаксиального оптического пути обеспечивает совпадение оптических осей для камеры и проектора, что приводит к совпадению проецируемого изображения с реальным объектом на разных рабочих расстояниях. .
Дальнейшая инженерная оптимизация и работы по валидации in vivo необходимы до перевода и распространения предлагаемой техники телементоринга в клинических условиях.Во-первых, текущая система использует общедоступную беспроводную сеть и бесплатный пакет программного обеспечения (например, TeamViewer) для передачи данных между локальным сайтом и удаленным сайтом. Такой дизайн не только делает скорость системы телементоринга уязвимой для сетевой среды, но и вызывает проблемы кибербезопасности.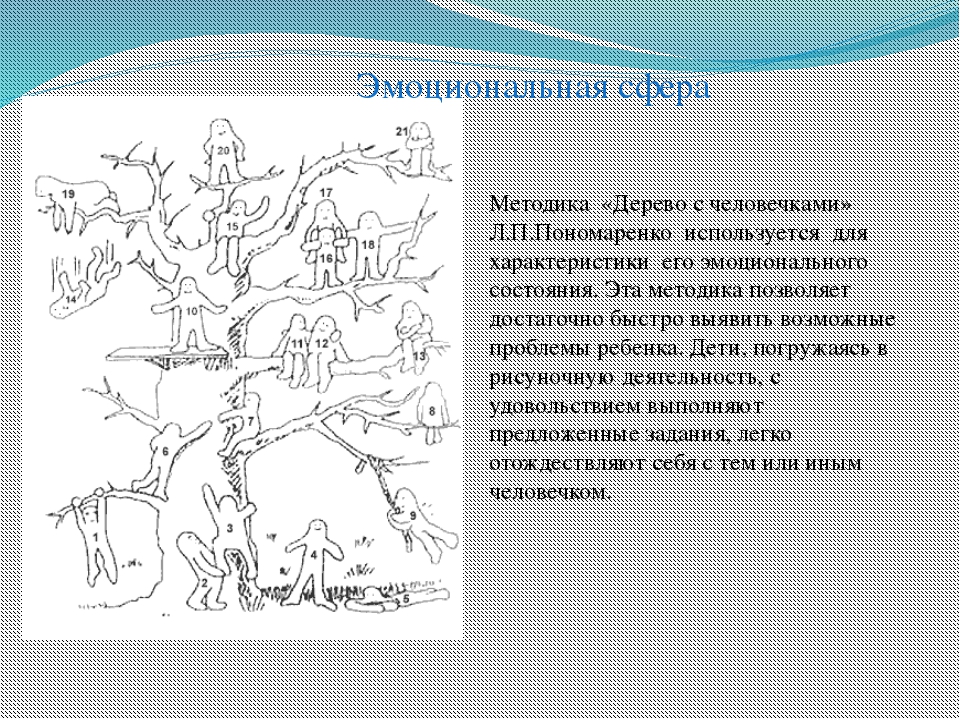 В нашем предварительном исследовании задержка передачи данных по сети между Колумбусом и Хэфэй, Китай, была оценена с помощью программного пакета TeamViewer. Задержка составила около 300 мс при скорости загрузки 32.08 Мбит / с и скорость выгрузки 16,83 Мбит / с в Хэфэй и скорость загрузки 20,31 Мбит / с и скорость передачи 7,07 Мбит / с в Колумбусе. Задержка сетевой передачи в телемедицине может быть дополнительно уменьшена за счет использования спутниковой, проводной сети или сети 5G. 32 — 35 Для клинического применения телементоринга требуется безопасный протокол беспроводной связи и специально разработанный пакет программного обеспечения. Во-вторых, чтобы облегчить распространение предлагаемой системы телементоринга в клинических условиях, необходимо оптимизировать многие рабочие параметры, такие как рабочее расстояние между проектором и операционным полем, угол обзора и яркость проектора.На данном этапе предварительного исследования контрастность и яркость проективной системы телементоринга недостаточны для использования в операционной с включенным хирургическим освещением.
В нашем предварительном исследовании задержка передачи данных по сети между Колумбусом и Хэфэй, Китай, была оценена с помощью программного пакета TeamViewer. Задержка составила около 300 мс при скорости загрузки 32.08 Мбит / с и скорость выгрузки 16,83 Мбит / с в Хэфэй и скорость загрузки 20,31 Мбит / с и скорость передачи 7,07 Мбит / с в Колумбусе. Задержка сетевой передачи в телемедицине может быть дополнительно уменьшена за счет использования спутниковой, проводной сети или сети 5G. 32 — 35 Для клинического применения телементоринга требуется безопасный протокол беспроводной связи и специально разработанный пакет программного обеспечения. Во-вторых, чтобы облегчить распространение предлагаемой системы телементоринга в клинических условиях, необходимо оптимизировать многие рабочие параметры, такие как рабочее расстояние между проектором и операционным полем, угол обзора и яркость проектора.На данном этапе предварительного исследования контрастность и яркость проективной системы телементоринга недостаточны для использования в операционной с включенным хирургическим освещением. В будущем многие методы, такие как модуляция хирургического света, увеличение интенсивности проектора и проекция на основе лазера, будут изучены для повышения их клинического применения в операционной. В-третьих, доступные платформы отображения и ввода в телементоринге зависят от программной поддержки электросвязи.Среди протестированных нами платформ ПК, планшетов и сотовых телефонов планшет, оснащенный стилусом, обеспечил удобный и естественный способ телеаннотации. В будущем мы будем систематически сравнивать характеристики согласованности и точности аннотаций на разных платформах ввода и отображения, чтобы оптимизировать производительность телементоринга для лучшего взаимодействия с пользователем. Мы также изучим другие телекоммуникационные инструменты и индивидуально запрограммируем функции телементоринга для оптимальной работы аннотаций.Наконец, удаленная крикотиротомия используется в качестве подтверждения концепции, чтобы продемонстрировать клиническую полезность предлагаемой системы.
В будущем многие методы, такие как модуляция хирургического света, увеличение интенсивности проектора и проекция на основе лазера, будут изучены для повышения их клинического применения в операционной. В-третьих, доступные платформы отображения и ввода в телементоринге зависят от программной поддержки электросвязи.Среди протестированных нами платформ ПК, планшетов и сотовых телефонов планшет, оснащенный стилусом, обеспечил удобный и естественный способ телеаннотации. В будущем мы будем систематически сравнивать характеристики согласованности и точности аннотаций на разных платформах ввода и отображения, чтобы оптимизировать производительность телементоринга для лучшего взаимодействия с пользователем. Мы также изучим другие телекоммуникационные инструменты и индивидуально запрограммируем функции телементоринга для оптимальной работы аннотаций.Наконец, удаленная крикотиротомия используется в качестве подтверждения концепции, чтобы продемонстрировать клиническую полезность предлагаемой системы. Поскольку крикотиротомия может быть не самым подходящим вмешательством для телеуправления, и поскольку процедура на животных не похожа на таковую в клинических условиях, перед клиническим распространением предлагаемой техники телементоринга требуется соответствующий выбор хирургического сценария и обширная клиническая проверка. Тем не менее, предложенная система проективной визуализации и телементоринга может использоваться для дистанционного управления многими хирургическими вмешательствами.
Поскольку крикотиротомия может быть не самым подходящим вмешательством для телеуправления, и поскольку процедура на животных не похожа на таковую в клинических условиях, перед клиническим распространением предлагаемой техники телементоринга требуется соответствующий выбор хирургического сценария и обширная клиническая проверка. Тем не менее, предложенная система проективной визуализации и телементоринга может использоваться для дистанционного управления многими хирургическими вмешательствами.
5.
Заключение
Мы сообщаем о хирургической навигационной системе, которая объединяет CPI и телекоммуникации для интерактивного телементоринга во время хирургических вмешательств. Техническая осуществимость вмешательств с телеуправлением подтверждена лабораторными экспериментами, а клиническая полезность предложенной системы продемонстрирована с помощью крикотиротомии с телеуправлением на модели кролика in vivo . Несмотря на то, что для распространения предлагаемой системы телементоринга в клинических условиях требуется дальнейшая клиническая проверка, наше исследование может преодолеть неравенство в сфере здравоохранения, приблизив к пациентам индивидуализированный медицинский и хирургический опыт.
Раскрытие информации
У авторов нет конфликта интересов.
Благодарности
Авторы выражают благодарность за гранты Национального фонда естественных наук Китая (NSFC) (гранты №№ 11002139 и 81327803), Контракт на развитие технологий провинции Аньхой (грант № 2016340022004031) и крупный научно-технический проект провинции Аньхой. (Грант № 17030801004).
Ссылки
1.
A. H. Haider et al., «Определение национальной повестки дня для исследования хирургического неравенства: рекомендации Национального института здоровья и Саммита Американского колледжа хирургов», JAMA Surg., 151 (6), 554 –563 (2016). https://doi.org/10.1001/jamasurg.2016.0014 Google Scholar2.
Р. Ройн, А. Охинмаа и Д. Хейли, «Оценка телемедицины: систематический обзор литературы», Может. Med. Доц. J., 165 (6), 765 –771 (2001). CMAJAX 0008-4409 Google Scholar9.
H. Sebajang et al. ,
«Роль телементора и телероботической помощи в проведении лапароскопической колоректальной хирургии в сельской местности»,
Surg.Endosc. Другие интервенционные технологии, 20
(9), 1389
–1393
(2006). https://doi.org/10.1007/s00464-005-0260-0 Google Scholar
,
«Роль телементора и телероботической помощи в проведении лапароскопической колоректальной хирургии в сельской местности»,
Surg.Endosc. Другие интервенционные технологии, 20
(9), 1389
–1393
(2006). https://doi.org/10.1007/s00464-005-0260-0 Google Scholar16.
Z. Zhang et al., «Носимая навигационная система Goggle для двухрежимной оптической и ультразвуковой локализации подозрительных поражений: валидационные исследования с использованием фантомов, имитирующих ткань, и модели ткани груди человека ex vivo», PLoS One, 11 (7), e0157854 (2016). https://doi.org/10.1371/journal.pone.0157854 POLNCL 1932-6203 Google Scholar24.
В. Мокшицкий и М. Татол, «Цветовая разница ΔE — обзор», Мах. Графика Зрение, 20 (4), 383 –411 (2011). Google ученый27.
К. Харрис и М. Стивенс, «Комбинированный детектор угла и края», в Proc. Alvey Vision Conf., (1988). Google ученый
Google ученый28.
Дж. Дуиссар, М. Э. Хаген и П. Морель, «Хирургическая система да Винчи», Бариатрическая роботизированная хирургия, 13 –27 Спрингер, Чам (2019).Google ученыйБиографии авторов отсутствуют.
Настольная проверка и проверка на животных системы проективной визуализации для потенциального использования в интраоперационной хирургии
Abstract
Предлагаем систему проекционной навигации для флюоресцентной визуализации и отображения изображения в естественном режиме зрительного восприятия. Система состоит из источника возбуждающего света, камеры с монохроматическим устройством с зарядовой связью (CCD), главного компьютера, проектора, датчика приближения и дополнительной камеры металл-оксид-полупроводник (CMOS).Благодаря трансформации перспективы и калибровке наша хирургическая навигационная система может достигать общей скорости визуализации более 60 кадров в секунду, с задержкой 330 мс, пространственной чувствительностью лучше 0,5 мм как в вертикальном, так и в горизонтальном направлениях и смещением проекции.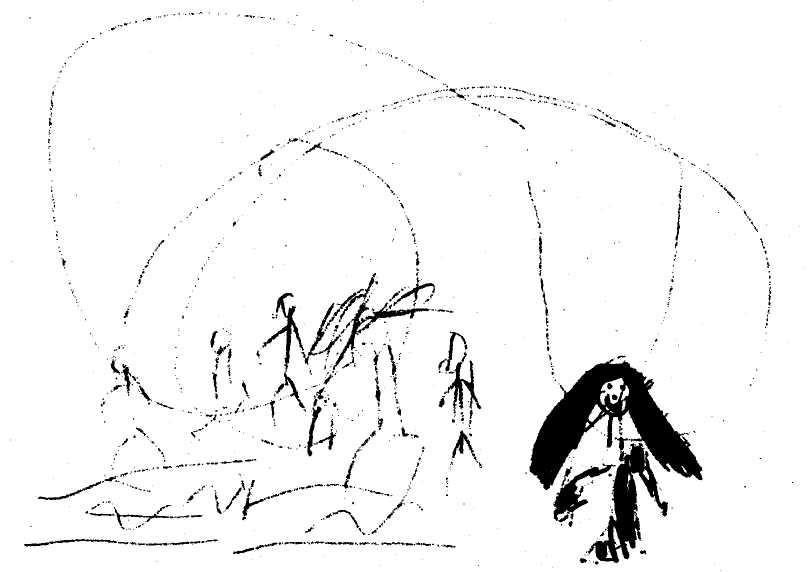 менее 1 мм. Техническая осуществимость хирургии под визуальным контролем продемонстрирована как на фантомах геля агар-агар, так и на модели куриной грудки ex vivo, содержащей индоцианин зеленый (ICG). Биологическая полезность системы продемонстрирована in vivo на классической модели метаболизма ICG в печени.Наши настольные эксперименты ex vivo и in vivo демонстрируют клинический потенциал для интраоперационного определения границ заболевания и хирургической резекции под визуальным контролем.
менее 1 мм. Техническая осуществимость хирургии под визуальным контролем продемонстрирована как на фантомах геля агар-агар, так и на модели куриной грудки ex vivo, содержащей индоцианин зеленый (ICG). Биологическая полезность системы продемонстрирована in vivo на классической модели метаболизма ICG в печени.Наши настольные эксперименты ex vivo и in vivo демонстрируют клинический потенциал для интраоперационного определения границ заболевания и хирургической резекции под визуальным контролем.
Образец цитирования: Gan Q, Wang D, Ye J, Zhang Z, Wang X, Hu C и др. (2016) Настольная проверка и проверка на животных системы проективной визуализации для потенциального использования в интраоперационном хирургическом руководстве. PLoS ONE 11 (7): e0157794. https://doi.org/10.1371/journal.pone.0157794
Редактор: Пей-Йи Чу, медицинский факультет Католического университета Фу Джен, Тайвань
Поступила: 28 декабря 2015 г . ; Одобрена: 3 июня 2016 г .; Опубликовано: 8 июля 2016 г.
; Одобрена: 3 июня 2016 г .; Опубликовано: 8 июля 2016 г.
Авторские права: © 2016 Gan et al.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе и его файлах с вспомогательной информацией.
Финансирование: Этот проект финансировался Фондом естественных наук Китая (№№ 81271527 и 81327803) и Фондом фундаментальных исследований для центральных университетов (WK20900
).Финансирующие организации не играли никакой роли в дизайне исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи. Конкурирующие интересы: Авторы заявили, что конкурирующих интересов не существует.
Введение
Для многих онкологических больных хирургическое вмешательство остается одним из наиболее эффективных вариантов лечения. Передовые методы хирургической навигации для точной оценки границы резекции опухоли могут помочь в принятии важных решений в операционной.Примером срочной клинической потребности в хирургической навигации может служить операция по сохранению груди (BCS). BCS — распространенный метод лечения рака груди на ранней стадии [1, 2]. Однако от 20% до 50% пациентов с BCS нуждаются в повторной процедуре удаления, что приводит к ненужному стрессу пациента, неоптимальному косметическому результату и увеличению частоты местных рецидивов [3–5]. Поскольку невозможность получить чистый край способствует высокому уровню повторного удаления, важно предоставить хирургу точную и специфичную для рака информацию о хирургическом поле в режиме реального времени.Гистопатологический анализ — золотой стандарт оценки риска рака. Однако обычная гистопатологическая оценка занимает много времени, требует больших затрат и позволяет легко пропустить остаточные поражения из-за ошибки отбора пробы. Следовательно, пациенты с патологически отрицательными краями хирургической резекции после БКС все еще имеют частоту местных рецидивов от 7% до 27% [6].
Следовательно, пациенты с патологически отрицательными краями хирургической резекции после БКС все еще имеют частоту местных рецидивов от 7% до 27% [6].
В последние годы методы визуализации ближней инфракрасной флуоресценции (NIRF) широко исследуются для неинвазивного обнаружения в режиме реального времени различных злокачественных новообразований тканей, таких как карцинома яичников [7], сторожевые лимфатические узлы [8–10], гепатоцеллюлярные карциномы [11], лимфатические системы [12, 13] и поражения груди [14, 15].В настоящее время доступны различные системы NIRF для доклинических и клинических исследований [16], в том числе с возможностями поляризационной визуализации [17]. Например, система SPY (Novadaq Technologies, Торонто, Канада) объединяет блок камеры, лазерный источник, монитор, пульт дистанционного управления и центральный процессор в одной мобильной тележке для хирургического руководства в клинических условиях [18]; Система FLARE (лаборатория Frangioni, Бостон, Массачусетс) состоит из двух мониторов, источников света, цветной видеокамеры и двух камер для одновременного получения изображений на длине волны 700 и 800 нм соответственно и была развернута для различных приложений хирургии под визуальным контролем [ 19, 20]. Это. Несмотря на эти клинические и технические достижения в визуализации NIRF, большинство существующих устройств визуализации представляют собой автономные системы, которые отображают интраоперационные изображения на отдельном экране. Использование такой системы для отображения интраоперационной информации в операционной может помешать хирургической процедуре, потому что они вынуждают хирургов переключать поля обзора вместо того, чтобы сосредоточиться на операционном поле. Кроме того, существующие системы интраоперационной флуоресцентной визуализации обычно громоздки и могут не поместиться в ограниченном пространстве операционной в клинических условиях.Кроме того, некоторые системы визуализации могут отображать только флуоресцентное излучение и хирургический фон последовательно, что затрудняет для хирургов сопоставление экранной информации хирургического поля с отображением фактического операционного поля.
Это. Несмотря на эти клинические и технические достижения в визуализации NIRF, большинство существующих устройств визуализации представляют собой автономные системы, которые отображают интраоперационные изображения на отдельном экране. Использование такой системы для отображения интраоперационной информации в операционной может помешать хирургической процедуре, потому что они вынуждают хирургов переключать поля обзора вместо того, чтобы сосредоточиться на операционном поле. Кроме того, существующие системы интраоперационной флуоресцентной визуализации обычно громоздки и могут не поместиться в ограниченном пространстве операционной в клинических условиях.Кроме того, некоторые системы визуализации могут отображать только флуоресцентное излучение и хирургический фон последовательно, что затрудняет для хирургов сопоставление экранной информации хирургического поля с отображением фактического операционного поля.
Недавно были разработаны носимые навигационные устройства для интраоперационной оценки хирургических полей [21–23].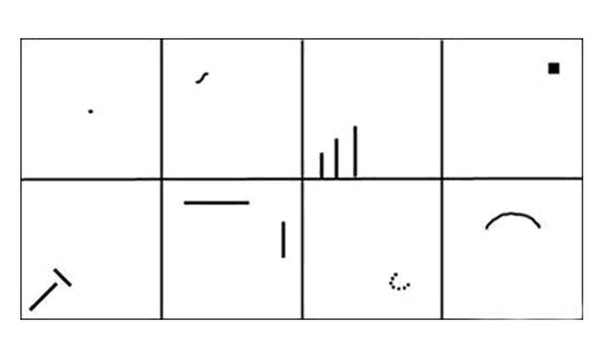 Эти навигационные устройства объединяют источник возбуждающего света, флуоресцентный фильтр, камеру и дисплей в носимой гарнитуре, что позволяет хирургам оценивать хирургические границы во время операции в естественный режим зрительного восприятия.Поскольку эти носимые устройства основаны на головном дисплее (HMD) или других носимых наглядных пособиях, они иногда неудобны для хирургов и могут легко блокировать их зрение. Кроме того, изображения хирургического края видны только человеку, который носит наглядное пособие, но недоступны для других в операционной без использования дополнительного дисплея. Наконец, слияние изображений между фоновыми и флуоресцентными изображениями требует трудоемкого вычислительного процесса и сопряжено с риском потери критически важной информации о болезни из-за ограниченного разрешения наглядного пособия и перекрывающихся функций между фоновыми и флуоресцентными изображениями.Чтобы преодолеть эти ограничения, исследователи вводят новый подход к проецированию данных визуализации непосредственно на пациента в обозначенных областях интереса, таких как кожа, внутренние органы и кости [24].
Эти навигационные устройства объединяют источник возбуждающего света, флуоресцентный фильтр, камеру и дисплей в носимой гарнитуре, что позволяет хирургам оценивать хирургические границы во время операции в естественный режим зрительного восприятия.Поскольку эти носимые устройства основаны на головном дисплее (HMD) или других носимых наглядных пособиях, они иногда неудобны для хирургов и могут легко блокировать их зрение. Кроме того, изображения хирургического края видны только человеку, который носит наглядное пособие, но недоступны для других в операционной без использования дополнительного дисплея. Наконец, слияние изображений между фоновыми и флуоресцентными изображениями требует трудоемкого вычислительного процесса и сопряжено с риском потери критически важной информации о болезни из-за ограниченного разрешения наглядного пособия и перекрывающихся функций между фоновыми и флуоресцентными изображениями.Чтобы преодолеть эти ограничения, исследователи вводят новый подход к проецированию данных визуализации непосредственно на пациента в обозначенных областях интереса, таких как кожа, внутренние органы и кости [24].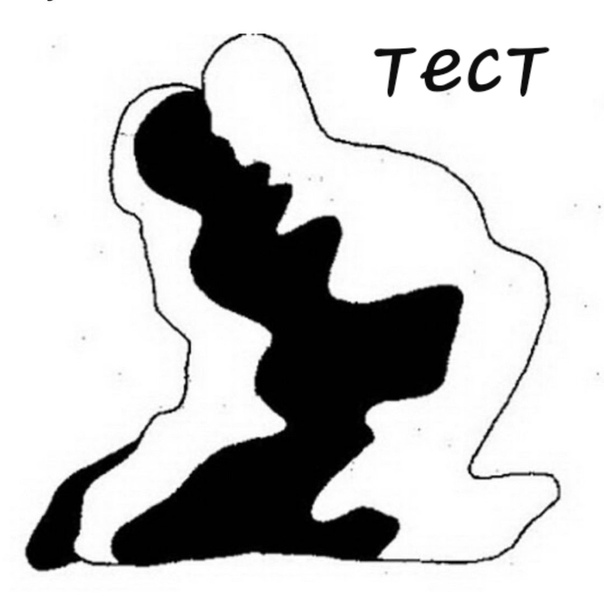 Эти проекционные системы обычно громоздкие, сложные и не оптимизированы для интраоперационного определения границ опухоли.
Эти проекционные системы обычно громоздкие, сложные и не оптимизированы для интраоперационного определения границ опухоли.
Здесь мы описываем хирургическую систему навигации, которая сочетает в себе интраоперационную флуоресцентную визуализацию и проекцию хирургического края в реальном времени. Концепция этой проективной хирургической навигационной системы проиллюстрирована на рисунке 1.При освещении операционного поля источником возбуждающего света светодиодной матрицы флуоресцентное излучение улавливается камерой CCD и передается на главный компьютер. Полученные флуоресцентные изображения обрабатываются и проецируются обратно на хирургическое поле в псевдоцветах с помощью мини-проектора, так что флуоресцентная информация, изначально невидимая невооруженным глазом, накладывается на операционное поле и непосредственно видна хирургам. Эта хирургическая навигационная система заменяет традиционный экран или HMD проектором, так что хирурги могут перемещаться по операционному полю и интуитивно определять области поражения в естественном режиме визуального восприятия с минимальным отвлечением.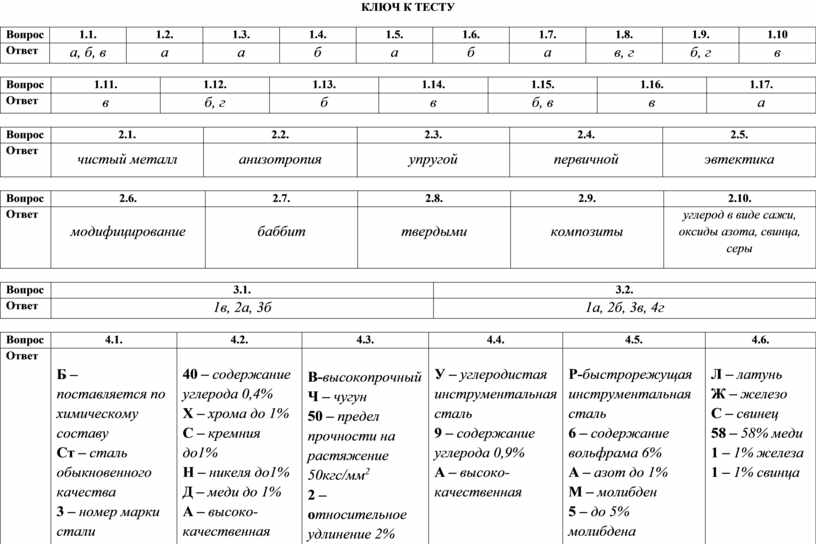
Материалы и методы
Аппаратное обеспечение
Как показано на рис. 1, основные аппаратные компоненты предлагаемой проективной хирургической системы навигации включают монохроматическую камеру CCD MV-VEM033SM (Microvision, Сиань, Китай) для флуоресцентной визуализации, мини-проектор (MEGO, Тяньцзинь, Китай) для проецирования видимые изображения, светодиодная матрица для освещения возбуждающим светом на длине волны 690 нм, ультразвуковой датчик приближения US-100 (Xinyuansheng, Шэньчжэнь, Китай) для обнаружения операционного поля и CMOS-камера C310 (Logitech, Сучжоу, Китай) для визуализации хирургического поля.Источник возбуждающего света состоит из 12 сверхъярких светодиодов с длиной волны 690 нм (Ксилань, Шэньчжэнь, Китай), расположенных в двух концентрических кругах, с четырьмя светодиодными шариками во внутреннем круге и восемью во внешнем круге. Источник возбуждающего света приводится в действие источником постоянного тока (DC) с напряжением 24 В и током 0,55 А.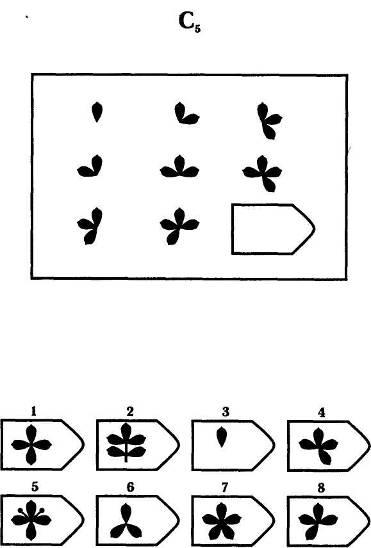 Источник возбуждающего света закреплен на присоске, снабженной универсальным шарниром, так что расстояние и направление освещения можно эффективно регулировать. Источник возбуждающего света расположен на расстоянии 7-15 см от места хирургического вмешательства, а площадь освещения составляет примерно 70-90 см. 2 .ПЗС-камера установлена на 35 см над операционным полем для получения флуоресцентных изображений с частотой кадров 120 кадров в секунду (fps) и разрешением 640 × 480. ПЗС-камера оснащена монохромным сенсором размером 1/4 дюйма с динамическим диапазоном 10 бит. Объектив с постоянным фокусным расстоянием с фокусным расстоянием 5 мм устанавливается на камеру, чтобы получить поле зрения (FOV) 224 мм × 168 мм для хирургического наблюдения. Между датчиком CCD и объективом установлен длиннопроходный фильтр FELH0800 800 нм (Thorlabs Inc., Newton, NJ) устанавливается так, чтобы собирать флуоресцентное излучение только в ближнем инфракрасном диапазоне длин волн. Мини-проектор DLP, установленный рядом с камерой CCD, используется для проецирования обработанных изображений на операционное поле с коэффициентом контрастности 3500: 1 и разрешением 854 x 480.
Источник возбуждающего света закреплен на присоске, снабженной универсальным шарниром, так что расстояние и направление освещения можно эффективно регулировать. Источник возбуждающего света расположен на расстоянии 7-15 см от места хирургического вмешательства, а площадь освещения составляет примерно 70-90 см. 2 .ПЗС-камера установлена на 35 см над операционным полем для получения флуоресцентных изображений с частотой кадров 120 кадров в секунду (fps) и разрешением 640 × 480. ПЗС-камера оснащена монохромным сенсором размером 1/4 дюйма с динамическим диапазоном 10 бит. Объектив с постоянным фокусным расстоянием с фокусным расстоянием 5 мм устанавливается на камеру, чтобы получить поле зрения (FOV) 224 мм × 168 мм для хирургического наблюдения. Между датчиком CCD и объективом установлен длиннопроходный фильтр FELH0800 800 нм (Thorlabs Inc., Newton, NJ) устанавливается так, чтобы собирать флуоресцентное излучение только в ближнем инфракрасном диапазоне длин волн. Мини-проектор DLP, установленный рядом с камерой CCD, используется для проецирования обработанных изображений на операционное поле с коэффициентом контрастности 3500: 1 и разрешением 854 x 480.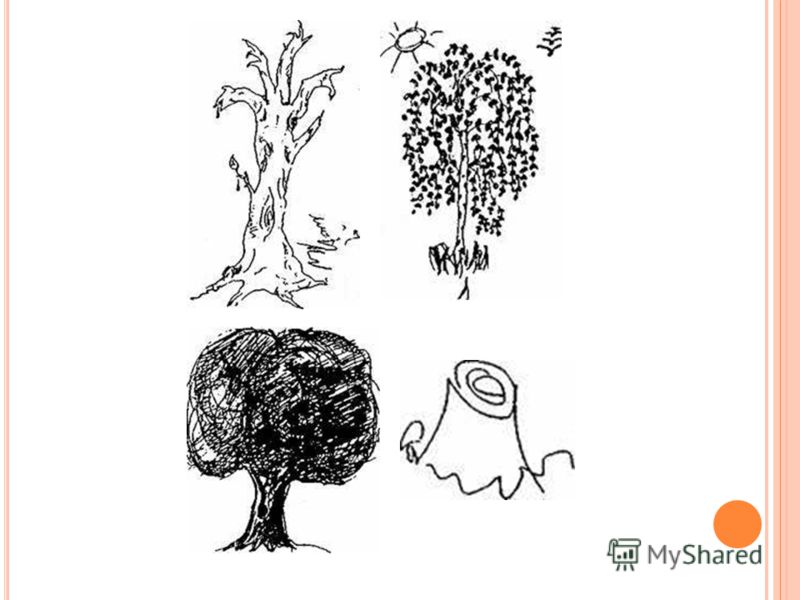 Проектор состоит из трехцветных светодиодов RGB с яркостью яркость около 300, площадь проецирования 24,2 × 13,7 см и расстояние проецирования 35 см. КМОП-камера получает изображения операционного поля для задач регистрации изображений, как подробно описано ниже.Настольный компьютер используется для обработки флуоресцентных изображений и передачи обработанных изображений на проектор.
Проектор состоит из трехцветных светодиодов RGB с яркостью яркость около 300, площадь проецирования 24,2 × 13,7 см и расстояние проецирования 35 см. КМОП-камера получает изображения операционного поля для задач регистрации изображений, как подробно описано ниже.Настольный компьютер используется для обработки флуоресцентных изображений и передачи обработанных изображений на проектор.
Алгоритмы регистрации изображений
Учитывая, что проектор и камера CCD не используют один и тот же оптический путь, калибровка необходима для обеспечения точного сопоставления проецируемых флуоресцентных изображений с реальной операционной сценой. С этой целью набор из четырех реперных маркеров размещается в четырех углах операционного поля для регистрации флуоресцентных изображений перед проецированием.Алгоритм автоматической регистрации реализуется путем вызова библиотеки компьютерного зрения с открытым исходным кодом в Microsoft Visual C ++. Матрица преобразования выводится на основе перспективного преобразования для выравнивания четырех спроецированных реперных маркеров с маркерами в операционном поле. В однородной системе координат общий вид преобразования можно выразить следующим образом:
В однородной системе координат общий вид преобразования можно выразить следующим образом:
Где от m11 до m33 — параметры преобразования, ( u , v , w ) — исходные трехмерные координаты, а ( x ′, y ′, w ′) — преобразованные координаты. w и w ′ являются дополнительными скалярами для однородной координаты, которые обычно обобщаются до единицы для точек. Для преобразования перспективы в изображение выполняется следующая операция:
Как оптический путь камеры CCD (между изображением ABCD чипа CCD и хирургической сценой A’B’C’D ‘), так и оптический путь проектора DMD (между изображением EFGH чипа DMD и проецируемым изображением E’F’G’ H ‘на хирургическую сцену) можно хорошо описать преобразованием перспективы, как показано на фиг. 2A.Когда E’F’G’H ‘совпадает с A’B’C’D’, проецируемое изображение точно накладывается на реальную хирургическую сцену, а флуоресцентное изображение, полученное камерой CCD, может быть спроецировано на хирургическое место, чтобы выделить заболевание. поле. Таким образом, чтобы преодолеть искажение проектора и обеспечить идеальное соответствие между прогнозируемой границей заболевания и фактическим операционным полем, используется алгоритм преобразования перспективы для преобразования изображения ABCD, полученного камерой CCD, в изображение EFGH, сформированное DMD, так что проецируемое изображение на хирургическое поле совпадает с фактическим операционным местом.Поэтому этот процесс называется «регистрацией». Для эффективной регистрации проецируемых изображений на хирургической плоскости мы идентифицируем матрицу перспективного преобразования путем калибровки системы в четырех точках, сопоставляющих исходное изображение (EFGH) с целевым изображением (ABCD). Чтобы гарантировать однозначную корреляцию в этих четырех точках, мы размещаем четыре реперных маркера по углам операционного поля и проецируем четыре соответствующих реперных маркера на поле для калибровки. С помощью внешней CMOS-камеры все перспективные преобразования между любыми двумя устройствами или изображениями можно идентифицировать по этим маркерам и их проекциям.
поле. Таким образом, чтобы преодолеть искажение проектора и обеспечить идеальное соответствие между прогнозируемой границей заболевания и фактическим операционным полем, используется алгоритм преобразования перспективы для преобразования изображения ABCD, полученного камерой CCD, в изображение EFGH, сформированное DMD, так что проецируемое изображение на хирургическое поле совпадает с фактическим операционным местом.Поэтому этот процесс называется «регистрацией». Для эффективной регистрации проецируемых изображений на хирургической плоскости мы идентифицируем матрицу перспективного преобразования путем калибровки системы в четырех точках, сопоставляющих исходное изображение (EFGH) с целевым изображением (ABCD). Чтобы гарантировать однозначную корреляцию в этих четырех точках, мы размещаем четыре реперных маркера по углам операционного поля и проецируем четыре соответствующих реперных маркера на поле для калибровки. С помощью внешней CMOS-камеры все перспективные преобразования между любыми двумя устройствами или изображениями можно идентифицировать по этим маркерам и их проекциям. Преобразование между маркерами на проекции DMD и точками на DMD, соответствующими физическим реперным маркерам, является перспективным преобразованием, которое мы ищем. Преобразование имеет репрезентативную матрицу, обозначенную tm.
Преобразование между маркерами на проекции DMD и точками на DMD, соответствующими физическим реперным маркерам, является перспективным преобразованием, которое мы ищем. Преобразование имеет репрезентативную матрицу, обозначенную tm.
На рис. 2В показана блок-схема нашей программы автоматической регистрации для калибровки системы. Перед процессом калибровки лист белой бумаги с четырьмя реперными маркерами помещается в центр хирургической плоскости. Апертуры камеры NIR (CCD) и камеры CMOS отрегулированы так, чтобы все реперные маркеры могли эффективно обнаруживаться обеими камерами.Изображение четырех реперных маркеров, полученное камерой NIR, проецируется мини-проектором на белую бумагу. Затем КМОП-камера получает изображение хирургической сцены, которое состоит как из физических реперных маркеров, так и из проецируемых. После того, как все восемь маркеров будут отображены и распознаны, программа автоматической регистрации вычислит соответствующую матрицу преобразования. Наконец, изображение с реперными маркерами, захваченное камерой NIR, преобразуется матрицей и проецируется на белую бумагу для оценки точности калибровки. Такой процесс может повторяться до тех пор, пока не будет достигнуто идеальное совмещение исходного и проецируемого изображений.
Такой процесс может повторяться до тех пор, пока не будет достигнуто идеальное совмещение исходного и проецируемого изображений.
После описанного выше процесса автоматической регистрации проецируемые изображения и фактические объекты совпадают друг с другом в плоскости совмещения (т. Е. Хирургической плоскости). Однако согласно фиг. 3A, когда высота h хирургической плоскости изменяется, проецируемое изображение может сместиться на расстояние l, поскольку оптическая ось проектора не совмещена с осью NIR-камеры.
Рис. 3. Связь между смещением проекции и разницей в высоте.
(a) Схематическая диаграмма смещения проекции, вызванного изменением высоты после регистрации, плоскость α является плоскостью регистрации, и есть смещение l на плоскости наблюдения β; (b) Треугольник вызвал отклонение в (a).
https://doi.org/10.1371/journal.pone.0157794.g003
На рис. 3B показана геометрическая иллюстрация смещения проекции, вызванного высотой. Подъем хирургической плоскости на dh увеличивает смещение проекции на dl. В плоскости AOB треугольники AOB и A’OB ’являются аналогичными треугольниками. Следовательно, относительное изменение смещения проекции l линейно пропорционально относительному изменению высоты изображения h.
В плоскости AOB треугольники AOB и A’OB ’являются аналогичными треугольниками. Следовательно, относительное изменение смещения проекции l линейно пропорционально относительному изменению высоты изображения h.
K в уравнении (2) определяется как коэффициент наклона для смещения проекции, вызванного высотой. Поскольку смещение l можно разложить на lx и ly в направлениях x и y, K также можно разложить на Kx и Ky соответственно: (3) (4)
Из приведенного выше анализа ясно, что смещение проекции, вызванное высотой, можно эффективно скорректировать, если заранее известны перепад высот h и коэффициенты наклона Kx и Ky.С этой целью мы предлагаем метод компенсации смещения проекции, вызванного разницей в высоте операционного поля и разницей оптического пути между проектором и камерой.
Этот метод лучше всего иллюстрируется рис. 3A, где представлены две плоскости проекции с разницей в высоте h. Компенсация осуществляется в два этапа. Сначала рассчитываются коэффициенты наклона на основе матриц преобразования этих двух плоскостей проекции tm1 и tm2 соответственно. Для любой точки ( x , y , 1) на флуоресцентном изображении преобразованные точки задаются уравнениями (5) и (6), а смещение проекции AB можно получить с помощью уравнения (7), где преобразованные точки обобщаются.Дополнительный скаляр для координаты AB равен нулю, что указывает на то, что это отрезок прямой:
(5)
(6)
(7)
Для любой точки ( x , y , 1) на флуоресцентном изображении преобразованные точки задаются уравнениями (5) и (6), а смещение проекции AB можно получить с помощью уравнения (7), где преобразованные точки обобщаются.Дополнительный скаляр для координаты AB равен нулю, что указывает на то, что это отрезок прямой:
(5)
(6)
(7)
Во-вторых, коэффициенты наклона Kx и Ky вычисляются из уравнений (3) и (4) отдельно с AB и h . При изменении высоты плоскости наблюдения (т.е. h ) смещение проекции в направлениях x и y (т.е. l x и l y ) составляет вычисляются, и исходные изображения переводятся соответствующим образом, так что целевые изображения совпадают с реальной сценой без необходимости дополнительной калибровки.
(8) В случае неплоской рабочей поверхности изображение разбивается на пиксели и рассматривается как отдельные маленькие плоскости для пиксельной коррекции высоты.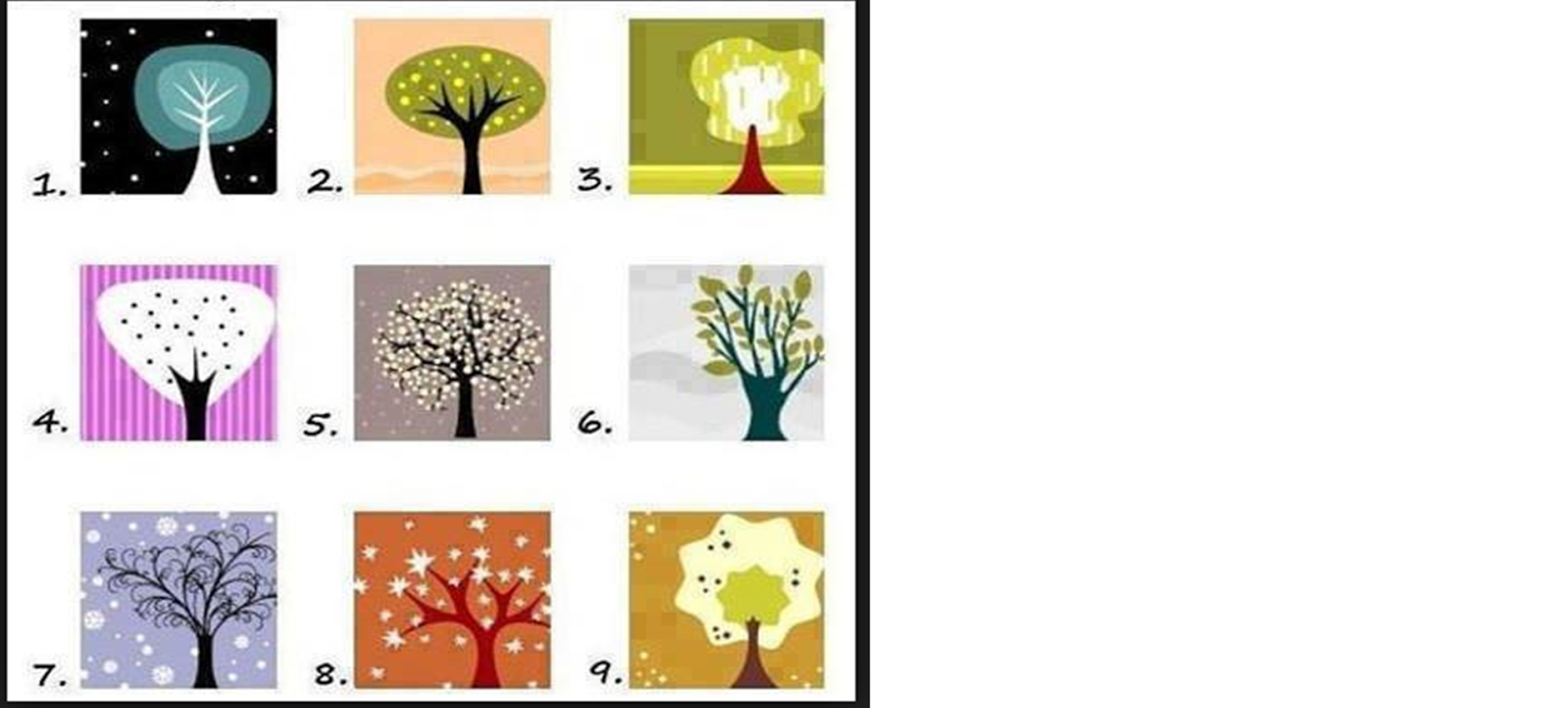 После преобразования всего изображения с перспективным преобразованием tm1 положение каждой точки пикселя ( x , y ) с индивидуальной относительной высотой h относительно плоскости совмещения изменяется с использованием уравнения (8) отдельно. После обработки всех пикселей целевое изображение будет совпадать с реальной сценой при ее проецировании.
После преобразования всего изображения с перспективным преобразованием tm1 положение каждой точки пикселя ( x , y ) с индивидуальной относительной высотой h относительно плоскости совмещения изменяется с использованием уравнения (8) отдельно. После обработки всех пикселей целевое изображение будет совпадать с реальной сценой при ее проецировании.
Проверка и оптимизация производительности
Характеристики изображения предлагаемой проективной хирургической навигационной системы охарактеризованы и оптимизированы настольными экспериментами с использованием индоцианинового зеленого (ICG) в качестве флуоресцентного контрастного вещества [23]. ICG — это цианиновый краситель, одобренный Управлением по контролю за продуктами и лекарствами США (FDA) для флуоресцентной визуализации во многих медицинских диагностических приложениях. В области лечения рака ICG использовалась для локализации сторожевых лимфатических узлов (SLN) при многих раковых заболеваниях, таких как рак груди [9], рак кожи [25], поверхностный пищевод [26] и рак желудка [27]. В водном растворе ICG имеет тенденцию к агрегации и сдвигает длину волны своего пика поглощения с примерно 780 нм до примерно 700 нм, в зависимости от его концентрации, в то время как его спектр излучения флуоресценции достигает максимума около 820 нм [28]. После внутривенной инъекции длина волны основного пика поглощения ICG смещается до 805 нм из-за полимеризации и агрегации с плазматическими белками, в то время как его пик флуоресценции испускается несколько раз в зависимости от фазы после инъекции [28].
В водном растворе ICG имеет тенденцию к агрегации и сдвигает длину волны своего пика поглощения с примерно 780 нм до примерно 700 нм, в зависимости от его концентрации, в то время как его спектр излучения флуоресценции достигает максимума около 820 нм [28]. После внутривенной инъекции длина волны основного пика поглощения ICG смещается до 805 нм из-за полимеризации и агрегации с плазматическими белками, в то время как его пик флуоресценции испускается несколько раз в зависимости от фазы после инъекции [28].
Интенсивность флуоресцентного излучения напрямую зависит от возбуждающего света.Высокая плотность энергии может привести к нагреванию тканей и термическому повреждению. Когда флюенс возбуждения> 50 мВт / см², низкомолекулярные органические флуорофоры обычно подвергаются необратимому фотообесцвечиванию [17]. Для интенсивности возбуждающего света применим диапазон 0–20 мВт / см² [21]. Мы измеряем возбуждающий источник света нашей системы с помощью оптического измерителя мощности / энергии VEGA (Ophir, Иерусалим, Израиль).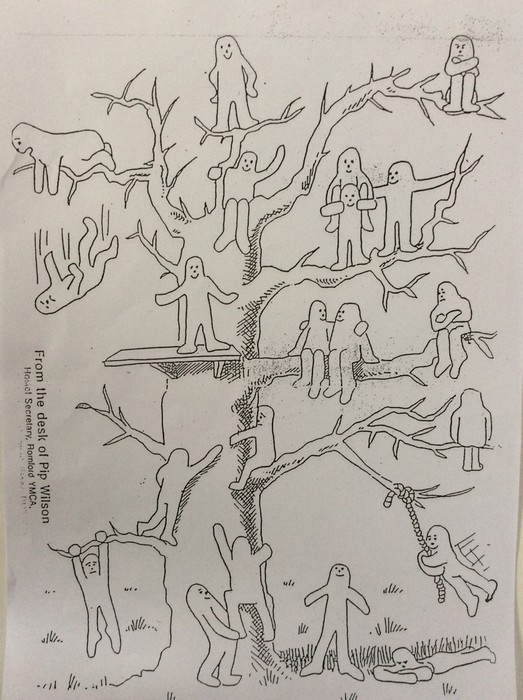 Расстояние между датчиком мощности и источником света составляет 7–17 см. Средняя интенсивность равна 4.37–6,57 мВт / см². Максимальное значение составляет около 9 мВт / см², что меньше 50 мВт / см².
Расстояние между датчиком мощности и источником света составляет 7–17 см. Средняя интенсивность равна 4.37–6,57 мВт / см². Максимальное значение составляет около 9 мВт / см², что меньше 50 мВт / см².
Рабочие характеристики предлагаемой проективной хирургической навигационной системы проверены с использованием водного раствора ICG (BOMEI Pharmaceutical, Шэньян, Китай) при различных концентрациях и сравниваются с характеристиками коммерческой системы визуализации мелких животных IVIS Lumina III (Perkin Elmer, Waltham, MA. Заранее готовят тринадцать образцов ICG с уровнями концентрации от 0,0001 мг / мл до 0,1 мг / мл.Каждый образец делится на две части для флуоресцентной визуализации с использованием нашей системы и системы визуализации мелких животных соответственно. На каждом уровне концентрации эксперименты по визуализации повторяются четыре раза, а уровни интенсивности флуоресценции усредняются и наносятся на график, как показано на рисунке 4. Согласно рисунку, предлагаемая проективная хирургическая навигационная система имеет сопоставимую, если не лучшую чувствительность и динамический диапазон для обнаружение излучения флуоресценции в водном растворе ICG.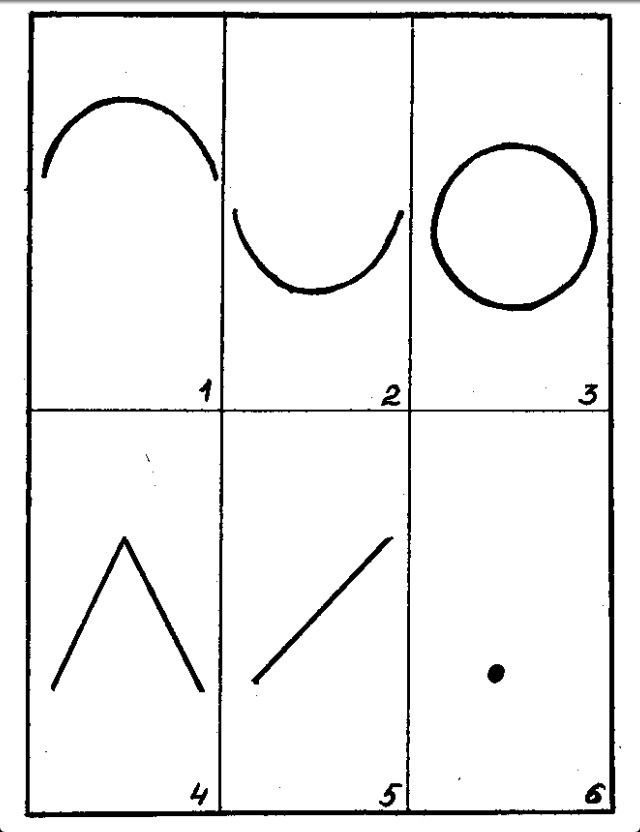
Рис 4.Сравнение способности обнаружения флуоресценции.
Концентрация раствора ICG составляет 0,0001, 0,0005, 0,001, 0,002, 0,003, 0,004, 0,006, 0,008, 0,01, 0,02, 0,03, 0,08, 0,1 мг / мл соответственно. Черная линия — это результаты обнаружения IVIS Lumina III, а красная линия — NIR-камера в нашей проективной хирургической системе навигации.
https://doi.org/10.1371/journal.pone.0157794.g004
Способность нашей проективной хирургической навигационной системы для получения и проецирования флуоресцентных изображений продемонстрирована на серии агар-агаровых фантомов и фантомов PMMA.Самородки различных форм и размеров изготавливаются из агар-агарового геля, нагруженного ICG, и помещаются в эти фантомы для моделирования различных аномалий тканей. На рис. 5А показан фантом из ПММА, в который встроены цилиндрические имитаторы опухоли размером от 1 до 20 мм. Для приготовления фантома смешивают 0,56 мг ICG, 2,1 г агара, 0,28 г диоксида титана, 4,9 мл глицерина и 70 мл дистиллированной воды, нагревают до 90 ° C, перемешивают магнитной мешалкой в течение 30-40 минут в химическом стакане, выливают в стакан.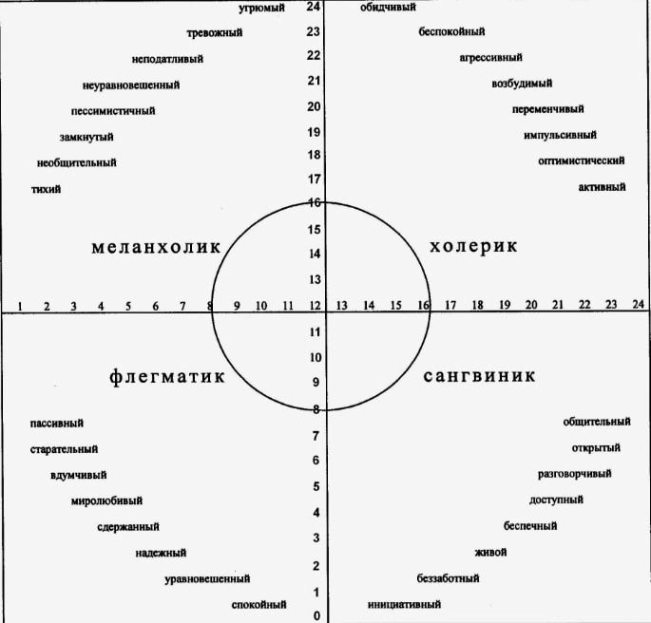 просверлить отверстия в диске из ПММА и остыть в течение 30–40 минут.Диаметр отверстий составляет 1 мм, 2,5 мм, 5 мм, 7,5 мм, 10 мм, 15 мм, 17,5 мм и 20 мм соответственно. На фиг.5С показан фантом геля агар-агар, в который заделаны кусочки нагруженного ICG геля агар-агар различной формы. Самородки готовятся заранее по тому же рецепту, что и фантом из ПММА. Как показано на рис. 5B и 5D, наша проективная навигационная система эффективно определяет положение и форму имитаторов опухолей, в то время как окружающие фантомные материалы не испускают флуоресценции.
просверлить отверстия в диске из ПММА и остыть в течение 30–40 минут.Диаметр отверстий составляет 1 мм, 2,5 мм, 5 мм, 7,5 мм, 10 мм, 15 мм, 17,5 мм и 20 мм соответственно. На фиг.5С показан фантом геля агар-агар, в который заделаны кусочки нагруженного ICG геля агар-агар различной формы. Самородки готовятся заранее по тому же рецепту, что и фантом из ПММА. Как показано на рис. 5B и 5D, наша проективная навигационная система эффективно определяет положение и форму имитаторов опухолей, в то время как окружающие фантомные материалы не испускают флуоресценции.
Рис. 5. Фантомы, в которые встроены имитаторы опухолей в геле агар-агар для проверки проективной хирургической системы навигации.
(a) фантом из ПММА, в который заделываются цилиндры из агар-агарового геля различного диаметра от 1 мм до 20 мм; (b) флуоресцентное излучение цилиндров с агар-агаром геля эффективно регистрируется и проецируется на фантом нашей проекционной навигационной системой; (c) фантом из агар-агарового геля, залитый гранулами агар-агарового геля различной формы; (d) Флуоресцентное излучение гранул агар-агарового геля эффективно регистрируется и проецируется на фантом нашей проекционной навигационной системой.
https://doi.org/10.1371/journal.pone.0157794.g005
Как мы уже обсуждали ранее, проецируемое изображение нашей проективной хирургической навигационной системой может отклоняться от своего физического положения при изменении высоты плоскости проекции. Это отклонение частично вызвано несовместимыми оптическими путями между проектором и камерой CCD и может быть откалибровано заранее на разной высоте. С этой целью разработана серия экспериментов для измерения проективного смещения, вызванного ростом, и демонстрации эффективности нашего алгоритма компенсации смещения, как описано ранее.Перед экспериментом готовят фантом, имитирующий опухоль, путем вставки двух цилиндрических чипов из агар-агарового геля, нагруженных ICG, в большую основу из агар-агарового геля, при этом границы цилиндрических чипов отмечены для видимости. Фантом помещается на проекционную плоскость с приводом от моторизованной линейной платформы (Zolix, Пекин, Китай). Источник возбуждающего света и КМОП-камера также устанавливаются на линейном предметном столике с фиксированными положениями относительно плоскости проекции. В начале эксперимента ПЗС-камера помещается на 20 см выше плоскости проекции, и эта плоскость отмечается как плоскость отсчета с высотой h = 0.Поскольку плоскость проецирования приводится в движение линейным столиком для перемещения от h = -50 мм до 50 мм с шагом 5 мм, фоновые и флуоресцентные изображения получаются на каждом этапе и проецируются обратно на плоскость проецирования. Для автоматической компенсации смещения проекции, вызванного высотой, рядом с камерой CCD установлен ультразвуковой датчик US-100, который определяет смещение плоскости проекции по высоте относительно плоскости отсчета. В каждом положении плоскости проецирования от -45 мм до 45 мм (5 мм на шаг, всего 19 положений) фактическая высота плоскости проецирования определяется ультразвуковым датчиком и отправляется на главный компьютер для автоматической корректировки высоты. -индуцированное смещение проекции.
В начале эксперимента ПЗС-камера помещается на 20 см выше плоскости проекции, и эта плоскость отмечается как плоскость отсчета с высотой h = 0.Поскольку плоскость проецирования приводится в движение линейным столиком для перемещения от h = -50 мм до 50 мм с шагом 5 мм, фоновые и флуоресцентные изображения получаются на каждом этапе и проецируются обратно на плоскость проецирования. Для автоматической компенсации смещения проекции, вызванного высотой, рядом с камерой CCD установлен ультразвуковой датчик US-100, который определяет смещение плоскости проекции по высоте относительно плоскости отсчета. В каждом положении плоскости проецирования от -45 мм до 45 мм (5 мм на шаг, всего 19 положений) фактическая высота плоскости проецирования определяется ультразвуковым датчиком и отправляется на главный компьютер для автоматической корректировки высоты. -индуцированное смещение проекции.
Мы также демонстрируем техническую возможность автоматической компенсации вызванного высотой смещения проекции одновременно в разных проекционных плоскостях. В эксперименте используются четыре плоскости разной высоты (например, A: 0 мм, B: 20 мм, C: 65 мм и D: 115 мм). Плоскость A выбирается в качестве базовой плоскости, и проекционная навигационная система калибруется на этой плоскости заранее. Высоты остальных трех плоскостей проекции передаются в компьютер для автоматической компенсации смещения проекции.
В эксперименте используются четыре плоскости разной высоты (например, A: 0 мм, B: 20 мм, C: 65 мм и D: 115 мм). Плоскость A выбирается в качестве базовой плоскости, и проекционная навигационная система калибруется на этой плоскости заранее. Высоты остальных трех плоскостей проекции передаются в компьютер для автоматической компенсации смещения проекции.
Мы также демонстрируем технику проекции хирургического края на модели ткани цыпленка ex vivo. Чтобы подготовить эту модель ex vivo, мы готовим имитатор опухоли, смешивая 0,56 мг ICG, 2,1 г агара, 0,28 г диоксида титана, 4,9 мл глицерина и 70 мл дистиллированной воды при 90 ° C, вводим смесь. на кусок свежей ткани куриной грудки на глубину примерно 1 мм и дайте ему остыть и затвердеть примерно на 30 минут. Поскольку этот фантом ex vivo подвергается воздействию возбуждающего света, флуоресцентное излучение имитатора опухоли регистрируется нашей проективной хирургической навигационной системой и сравнивается с излучением, полученным системой визуализации мелких животных IVIS.
Эксперименты на животных
Голая мышь BALB / c-nu (NU / NU, Vital River Laboratory Animal Technology Co. Ltd, Пекин, Китай) 7-недельного возраста и массой около 20 г использовалась для проверки на животных. Протокол для животных одобрен Комитетом по уходу и использованию животных при Научно-техническом университете Китая (номер протокола: USTCACUC1501014). Перед экспериментом животных размещают в комнате для кормления, свободной от специфических патогенов (SPF) в Центральном центре наук о жизни, USTC.Как указано в протоколе для животных, животное анестезируют путем внутрибрюшинной инъекции хлоралгидрата (350 мг / кг). Общая вводимая доза ICG должна быть ниже 2 мг / кг. Инъекционная доза рассчитывается на основе 0,5 мг / кг (инструкции по лекарственным средствам ICG от фармацевтической компании (Акорн, Лейк-Форест, Иллинойс, США), имеющей сертификат FDA). ICG растворяют в стерильной воде заранее, чтобы получить общий результат. объем 0,5–1 мл и концентрация 0,01 мг / мл. После анестезии животное фиксируют на хирургической панели в положении лежа на спине, вытянув четыре конечности и закрепив их медицинскими лентами.Во время эксперимента состояние животных тщательно контролируется каждые 5 минут, чтобы гарантировать, что процедура испытания не вызывает боли или стресса. Источник возбуждающего света, CMOS-камера и CCD-камера размещаются над хирургической плоскостью с соответствующей регулировкой для эффективного освещения и получения изображений от всего животного. После болюсной инъекции раствора ICG в хвостовую вену в дозе 0,4 мг / кг массы тела [29–31] флюоресцентные изображения собираются, обрабатываются главным компьютером и непрерывно проецируются обратно на животное до конца эксперимента. .
После анестезии животное фиксируют на хирургической панели в положении лежа на спине, вытянув четыре конечности и закрепив их медицинскими лентами.Во время эксперимента состояние животных тщательно контролируется каждые 5 минут, чтобы гарантировать, что процедура испытания не вызывает боли или стресса. Источник возбуждающего света, CMOS-камера и CCD-камера размещаются над хирургической плоскостью с соответствующей регулировкой для эффективного освещения и получения изображений от всего животного. После болюсной инъекции раствора ICG в хвостовую вену в дозе 0,4 мг / кг массы тела [29–31] флюоресцентные изображения собираются, обрабатываются главным компьютером и непрерывно проецируются обратно на животное до конца эксперимента. .
Анализ данных и результаты
Пространственное разрешение
Достижимое пространственное разрешение проективной хирургической навигационной системы проверяется с использованием тестового шаблона, как показано на рис. 6A. Размер тестовой таблицы 71 × 36 мм, она состояла из горизонтально и вертикально напечатанных полос. Полосы делятся на две группы. В одной группе толщина полос составляет 0,5, 1,0, 1,5, 2,0, 2,5, 3,0, 3,5 и 4,0 мм с таким же разделением (2 мм). В другой группе полосы разделены нулем.5–4,0 мм с увеличением на каждую полоску на 0,5 мм. Согласно фиг.6B, проецируемые полосы перекрывают напечатанные полосы на бумаге, что затрудняет различение и количественный анализ разрешения. Поэтому мы программируем систему так, чтобы обработанное изображение проецировалось на сторону напечатанных полос с четким разделением. Как показано на фиг. 6C, элементы размером менее 0,5 мм могут быть уловлены невооруженным глазом как в вертикальном, так и в горизонтальном направлениях.
Полосы делятся на две группы. В одной группе толщина полос составляет 0,5, 1,0, 1,5, 2,0, 2,5, 3,0, 3,5 и 4,0 мм с таким же разделением (2 мм). В другой группе полосы разделены нулем.5–4,0 мм с увеличением на каждую полоску на 0,5 мм. Согласно фиг.6B, проецируемые полосы перекрывают напечатанные полосы на бумаге, что затрудняет различение и количественный анализ разрешения. Поэтому мы программируем систему так, чтобы обработанное изображение проецировалось на сторону напечатанных полос с четким разделением. Как показано на фиг. 6C, элементы размером менее 0,5 мм могут быть уловлены невооруженным глазом как в вертикальном, так и в горизонтальном направлениях.
Рис. 6. Достижимые пространственные разрешения проекционной навигационной системы.
(a) Испытательный образец имеет размер 71 мм × 36 мм, состоящий из горизонтальных и вертикальных полос толщиной от 0,5 до 4 мм и расстоянием разделения от 0,5 до 4 мм. (b) Проецируемое изображение накладывается на напечатанный тестовый образец. (c) Параллельное сравнение тестового шаблона и проецируемого изображения.
(c) Параллельное сравнение тестового шаблона и проецируемого изображения.
https://doi.org/10.1371/journal.pone.0157794.g006
Полосы, разделенные разными интервалами в тестовой таблице, извлекаются для отдельных тестов.Полосы проекции сравниваются со стандартными полосами. Все изображения конвертируются в оттенки серого. Затем вычисляются значения серого в средних точках полос и отображаются в виде линейного графика. Как показано на рис. 7A и 7B, Δ1 = d1 / D1 = 0,212 <0,263 и Δ2 = d2 / D2 = 0,326> 0,263. Согласно критерию Рэлея [32], дифференцируемое расстояние менее 0,5 мм по вертикали и находится в пределах 0,5–1,0 мм по горизонтали.
Рис. 7. Индивидуальный анализ тестовой таблицы пространственных разрешений.
(a) Различное разделение полос в горизонтальном направлении. б) переменное разделение полос в вертикальном направлении.
https://doi.org/10.1371/journal.pone.0157794.g007
Ответ системы
Принимая во внимание время, необходимое для получения, обработки и проецирования изображений хирургического поля, ожидается, что проективная навигационная система может испытывать определенный уровень задержки, особенно когда она используется для хирургической навигации на высокой скорости. Чтобы количественно оценить задержку системы, мы печатаем черную точку диаметром 2 см на листе бумаги и помещаем бумагу на линейный трансляционный столик. После калибровки системы линейная ступень запрограммирована на перемещение по горизонтали со ступенчатой скоростью от 1 м / мин до 6 м / мин с увеличением на 1 м / мин за шаг. На каждом уровне скорости черная точка отображается как камерой CMOS, так и камерой CCD и проецируется обратно на бумагу после преобразования перспективы и компенсации смещения.На рис. 8 показаны напечатанные и проецируемые черные точки на разных уровнях скорости. На основе этих изображений предполагается, что общее время задержки системы составляет около 330 мс. Очевидно, проецируемое изображение больше отклоняется от своего фактического местоположения по мере увеличения скорости движения операционного поля. Чтобы достичь точности навигации лучше 2 мм, относительное движение между операционным полем и проективной навигационной системой не должно превышать скорость 1 м / мин.
Чтобы количественно оценить задержку системы, мы печатаем черную точку диаметром 2 см на листе бумаги и помещаем бумагу на линейный трансляционный столик. После калибровки системы линейная ступень запрограммирована на перемещение по горизонтали со ступенчатой скоростью от 1 м / мин до 6 м / мин с увеличением на 1 м / мин за шаг. На каждом уровне скорости черная точка отображается как камерой CMOS, так и камерой CCD и проецируется обратно на бумагу после преобразования перспективы и компенсации смещения.На рис. 8 показаны напечатанные и проецируемые черные точки на разных уровнях скорости. На основе этих изображений предполагается, что общее время задержки системы составляет около 330 мс. Очевидно, проецируемое изображение больше отклоняется от своего фактического местоположения по мере увеличения скорости движения операционного поля. Чтобы достичь точности навигации лучше 2 мм, относительное движение между операционным полем и проективной навигационной системой не должно превышать скорость 1 м / мин. Учитывая, что частота дыхания взрослого человека составляет 12–18 вдохов в минуту, что соответствует 3-5 секундам на вдох [33], латентность системы в 330 мс не вызовет значительного артефакта локализации из-за дыхательных движений.Учитывая, что проективная хирургическая навигационная система устанавливается над операционным полем вместо того, чтобы ее носить хирург, относительно легко контролировать движение системы в пределах этого уровня скорости. Дальнейшая разработка программного обеспечения и инженерная оптимизация необходимы, чтобы сократить время задержки системы для проецирования в реальном времени без задержек.
Учитывая, что частота дыхания взрослого человека составляет 12–18 вдохов в минуту, что соответствует 3-5 секундам на вдох [33], латентность системы в 330 мс не вызовет значительного артефакта локализации из-за дыхательных движений.Учитывая, что проективная хирургическая навигационная система устанавливается над операционным полем вместо того, чтобы ее носить хирург, относительно легко контролировать движение системы в пределах этого уровня скорости. Дальнейшая разработка программного обеспечения и инженерная оптимизация необходимы, чтобы сократить время задержки системы для проецирования в реальном времени без задержек.
Рис. 8. Экспериментальные результаты, моделирующие влияние движения хирургической сцены на запаздывание визуализации проективной навигационной системы.
(a-f) показывают проецируемый рисунок (серая точка) и реальный объект (черная точка) при следующих скоростях движения: 1, 2, 3, 4, 5 и 6 м / мин соответственно.
https://doi.org/10. 1371/journal.pone.0157794.g008
1371/journal.pone.0157794.g008
Фантомное исследование
Как описано ранее, проецируемое изображение может отклоняться от фактического положения хирургической сцены при изменении высоты плоскости проекции. С помощью геометрического анализа, показанного на рис. 3, мы также выдвигаем гипотезу о том, что смещение проекции линейно коррелирует с высотой плоскости проекции.Эта гипотеза дополнительно подтверждается серией экспериментов, как показано на рис. 9. Когда плоскость проекции перемещается на разную высоту от -45 мм до +45 мм, камера CCD получает флуоресцентное изображение двух цилиндрических образцов, загруженных ICG, и проецирует его обратно. к плоскости проекции, как показано на рис. 9A – 9E. Согласно рисунку, проецируемое изображение идеально соответствует геометрии образца при h = 0 мм, которая является калиброванной эталонной плоскостью. Поскольку высота плоскости проекции отклоняется от плоскости отсчета, смещение проекции увеличивается.В этом исследовании высота плоскости проекции определяется датчиком приближения и вычисляется матрица преобразования для автоматической компенсации смещения проекции, вызванного высотой. На рис. 9F показаны усредненные смещения проекции на разных уровнях высоты до и после компенсации. Согласно рисунку, смещение проекции линейно коррелирует с высотой плоскости проекции до применения алгоритма компенсации. После компенсации смещение проекции контролируется менее 1 мм на любой высоте и больше не имеет отношения лайнера с разницей высоты, что доказывает, что взаимосвязь между разницей высоты и смещениями является лайнером и алгоритм коррекции высоты эффективен.
На рис. 9F показаны усредненные смещения проекции на разных уровнях высоты до и после компенсации. Согласно рисунку, смещение проекции линейно коррелирует с высотой плоскости проекции до применения алгоритма компенсации. После компенсации смещение проекции контролируется менее 1 мм на любой высоте и больше не имеет отношения лайнера с разницей высоты, что доказывает, что взаимосвязь между разницей высоты и смещениями является лайнером и алгоритм коррекции высоты эффективен.
Рис. 9. Фантомное исследование для демонстрации проективной точности как функции разницы высот между плоскостью проекции и плоскостью отсчета.
(a) — (e): Когда плоскость проецирования перемещается с 40 мм выше на 40 мм ниже зарегистрированной эталонной плоскости, проецируемое изображение смещается слева направо от фактического фантома. (c): если плоскость проекции идентична базовой плоскости, проецируемое изображение и фактический фантом совместно регистрируются без смещения. (f) Наблюдается линейная зависимость между смещением проекции и разностью высот без коррекции высоты, в то время как смещение проекции регулируется в пределах 1 мм для всех разностей высот после применения алгоритма коррекции высоты.
https://doi.org/10.1371/journal.pone.0157794.g009
Согласно рис.9, проецируемое изображение хорошо совпадает с реальными фантомными объектами только тогда, когда плоскость совмещения находится на контрольной плоскости, где система калибруется в продвигать. Когда плоскость регистрации отклоняется от плоскости отсчета, возникает смещение проекции, и уровень смещения пропорционален разнице высот между этими двумя плоскостями, как показано на рис. 9A – 9E. На рис. 9F показано, что смещение проекции линейно коррелирует с разницей в высоте.На рисунке также показано, что алгоритм компенсации смещения может эффективно устранить смещение проекции, вызванное высотой.
Наша проективная навигационная система сравнивается с системой визуализации мелких животных IVIS с использованием пяти наборов круглых фантомов разного диаметра (2,4, 1,9, 1,6, 1,3 и 0,9 см). В каждый набор входят три фантома одинакового размера, расположенные в виде прямоугольного треугольника со стороной 5 см. Для каждого набора фантомов флюоресцентные изображения получают как проективная система, так и система IVIS, чтобы рассчитать расстояния между соседними круглыми фантомами.На рис. 10А сравниваются усредненные фантомные расстояния и стандартные отклонения, измеренные проективной системой и системой IVIS как в горизонтальном, так и в вертикальном направлениях. Согласно рисунку, значения p этих измерений больше 0,05, что указывает на то, что расстояния, измеренные нашей проективной системой, не имеют существенных отличий от расстояний, полученных системой IVIS. В другом эксперименте флюоресцентные изображения набора фантомов с одинаковыми размерами, но разделенных разными интервалами (3, 4, 5, 6 и 7 см) захватываются двумя системами.Согласно фиг. 10B, интервалы, обнаруженные двумя системами, были близко аппроксимированы, и результаты имели одинаковую тенденцию в обоих направлениях.
Для каждого набора фантомов флюоресцентные изображения получают как проективная система, так и система IVIS, чтобы рассчитать расстояния между соседними круглыми фантомами.На рис. 10А сравниваются усредненные фантомные расстояния и стандартные отклонения, измеренные проективной системой и системой IVIS как в горизонтальном, так и в вертикальном направлениях. Согласно рисунку, значения p этих измерений больше 0,05, что указывает на то, что расстояния, измеренные нашей проективной системой, не имеют существенных отличий от расстояний, полученных системой IVIS. В другом эксперименте флюоресцентные изображения набора фантомов с одинаковыми размерами, но разделенных разными интервалами (3, 4, 5, 6 и 7 см) захватываются двумя системами.Согласно фиг. 10B, интервалы, обнаруженные двумя системами, были близко аппроксимированы, и результаты имели одинаковую тенденцию в обоих направлениях.
Рис. 10. Сравнение проективной системы и системы IVIS при фантомном исследовании.
(а) Сравнение фантомов разных размеров на одинаковое расстояние. (б) Сравнение фантомов одного размера через разные промежутки времени.
(б) Сравнение фантомов одного размера через разные промежутки времени.
https://doi.org/10.1371/journal.pone.0157794.g010
Исследование Ex-vivo
Модель ткани, имитирующая опухоль ex vivo, как показано на фиг. 11A, используется для оценки производительности системы проективной навигации и демонстрации процедуры резекции опухоли под контролем изображения.В свежую ткань куриной грудки вводят раствор геля агар-агара, нагруженный ICG, и помещают в операционное поле. Поскольку возбуждающий свет с длиной волны 690 нм освещает ткань курицы, флуоресцентное излучение от введенного раствора геля агар-агар с введенным ICG регистрируется нашей навигационной системой и проецируется обратно на место операции в псевдоцвете, как показано на рис. 11A. Под руководством проецируемого псевдоцветного изображения на операционном поле мы можем завершить процедуру хирургической резекции, не глядя на экран.Кроме того, система проекционной навигации позволяет нам локализовать остаточные поражения в хирургической полости для повторной резекции, как показано стрелками на Рис.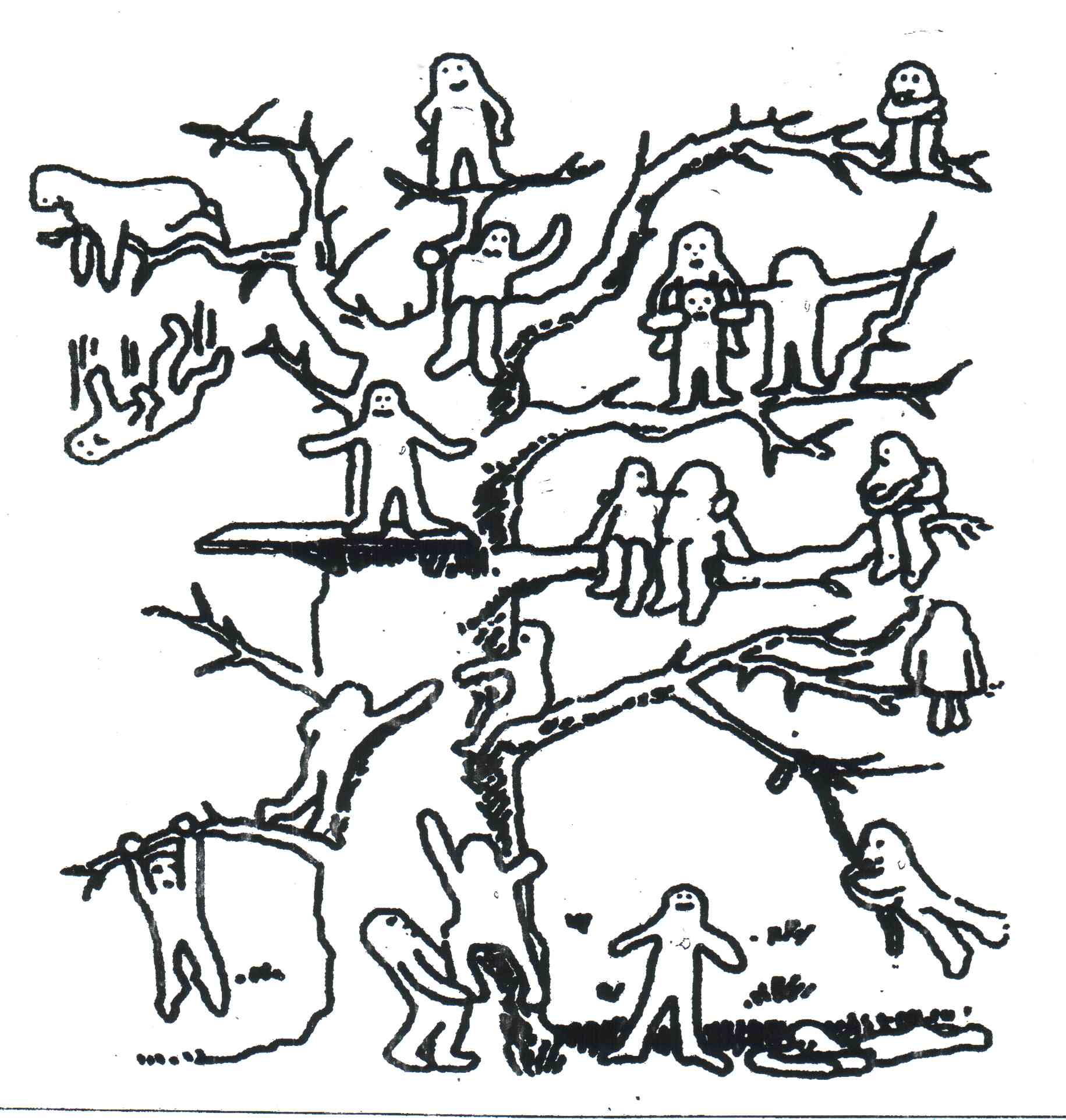 11C. Чтобы оценить качество изображения нашей проективной навигационной системы, одна и та же ткань цыпленка также визуализируется системой визуализации мелких животных IVIS Lumina III (Perkin Elmer, Waltham, MA) до и после резекции. Согласно рис. 11B и 11D, система IVIS показывает хирургические границы и остаточные заболевания, совпадающие с таковыми, полученными системой проективной навигации, что указывает на техническую осуществимость интраоперационной навигации и обнаружения остаточных повреждений при операциях по удалению рака.
11C. Чтобы оценить качество изображения нашей проективной навигационной системы, одна и та же ткань цыпленка также визуализируется системой визуализации мелких животных IVIS Lumina III (Perkin Elmer, Waltham, MA) до и после резекции. Согласно рис. 11B и 11D, система IVIS показывает хирургические границы и остаточные заболевания, совпадающие с таковыми, полученными системой проективной навигации, что указывает на техническую осуществимость интраоперационной навигации и обнаружения остаточных повреждений при операциях по удалению рака.
Рис. 11. Демонстрация процедуры резекции опухоли под визуальным контролем с использованием модели ткани, имитирующей опухоль ex vivo.
(a) Модель ткани, наблюдаемая проективной навигационной системой перед резекцией. (b) Модель, наблюдаемая системой визуализации мелких животных IVIS перед резекцией. (c) Модель, наблюдаемая проективной навигационной системой после резекции. Стрелки соответствуют идентифицированным остаточным очагам. (d) Система IVIS также фиксирует два остаточных поражения (черные стрелки).
https: // doi.org / 10.1371 / journal.pone.0157794.g011
Исследование in vivo
Техника проективной хирургической навигации также продемонстрирована in vivo на модели голых мышей. На фиг. 12 показана серия флуоресцентных изображений, спроецированных в псевдоцвете через 30, 120, 180, 360 и 480 минут после болюсной инъекции в хвостовую вену раствора ICG в дозе 0,4 мг / кг веса тела. Используя проективную навигационную систему, фармакокинетические характеристики ICG можно непосредственно визуализировать невооруженным глазом. В течение 30 минут после инъекции ICG в хвостовую вену флуоресцентный краситель быстро накапливается в печени, что приводит к повышенной яркости проецируемых изображений, как показано на фиг. 12B.Эмиссия флуоресценции в PCF печени постепенно ослабевает и, в конечном итоге, уменьшается через 1 час после инъекции ICG, в то время как часть желчного пузыря постепенно выделяется, указывая на дискретность ICG желчью в желчный пузырь. Через два часа после инъекции выделенное флуоресцентное излучение перемещается из желчного пузыря в среднюю, а затем в нижнюю части брюшной полости, указывая на дальнейшую транспортировку ICG через кишечник. Через несколько часов после инъекции ICG эмиссия флуоресценции не может быть обнаружена и спроецирована.
Через два часа после инъекции выделенное флуоресцентное излучение перемещается из желчного пузыря в среднюю, а затем в нижнюю части брюшной полости, указывая на дальнейшую транспортировку ICG через кишечник. Через несколько часов после инъекции ICG эмиссия флуоресценции не может быть обнаружена и спроецирована.
Рис. 12. Распределение ICG in vivo у мышей nude после инъекции в хвостовую вену.
(a-f) Изображения, полученные с использованием проективной навигационной системы, в разное время представляют собой внутривенную инъекцию ICG. Время получения изображения составляет 0, 30 минут, 2 часа, 3 часа, 6 часов, 8 часов после инъекции отдельно. Изображения показывают скопление красителя в печени (L), желчном пузыре (G) и кишечнике (I).
https://doi.org/10.1371/journal.pone.0157794.g012
Через три часа после i.v. После инъекции раствора ICG животное умерщвляют путем смещения шейки матки, а затем лапаротомируют для прямой визуализации распределения ICG в брюшной полости. Согласно фиг. 13A и 13B, значительное количество ICG накапливается в желчном пузыре, кишечнике и небольшой части печени, в то время как небольшое количество ICG может быть обнаружено в коже. Поскольку мы определяем небольшую интересующую область (ROI) в обозначенной области печени и вычисляем усредненную интенсивность флуоресценции в пределах ROI с течением времени, мы можем оценить фармакокинетический профиль ICG в печени после i.v. впрыск, как показано на рис. 13C – 13E. Согласно рисунку, распределение ICG в печени идет по экспоненциальному закону. Всплеск наблюдается на 16-й минуте после i.v. инъекция вызывается внезапным движением животного и не отражает фактического изменения концентрации ICG.
Согласно фиг. 13A и 13B, значительное количество ICG накапливается в желчном пузыре, кишечнике и небольшой части печени, в то время как небольшое количество ICG может быть обнаружено в коже. Поскольку мы определяем небольшую интересующую область (ROI) в обозначенной области печени и вычисляем усредненную интенсивность флуоресценции в пределах ROI с течением времени, мы можем оценить фармакокинетический профиль ICG в печени после i.v. впрыск, как показано на рис. 13C – 13E. Согласно рисунку, распределение ICG в печени идет по экспоненциальному закону. Всплеск наблюдается на 16-й минуте после i.v. инъекция вызывается внезапным движением животного и не отражает фактического изменения концентрации ICG.
Рис. 13. In vivo, зависимость концентрации ICG от времени в печени мыши после инъекции ICG.
(a) «голая» мышь перед рассечением через 3 часа после внутривенной инъекции хвоста ICG; (б) После того, как мышь умерщвлена вывихом шейного позвонка, мы рассекаем ее брюшко и наблюдаем анатомическую карту. (c) Флуоресцентное изображение, снятое камерой NIR. Область в белой рамке используется для расчета интенсивности флуоресценции. (d) Изображение обнаженной мыши под проективной навигационной системой, полученное невооруженным глазом. (e) Соответствующие основные временные характеристики интенсивности флуоресценции.
(c) Флуоресцентное изображение, снятое камерой NIR. Область в белой рамке используется для расчета интенсивности флуоресценции. (d) Изображение обнаженной мыши под проективной навигационной системой, полученное невооруженным глазом. (e) Соответствующие основные временные характеристики интенсивности флуоресценции.
https://doi.org/10.1371/journal.pone.0157794.g013
ICG — это одобренный FDA флуоресцентный агент, который обычно используется для клинической ангиографии. После i.v. При инъекции ICG циркулирует, выводится печенью, выводится в неметаболизированной форме с желчью, накапливается в кишечнике через желчный проток и, в конечном итоге, выводится с калом [28, 34, 35].Наши результаты визуализации in vivo совпадают с этой классической моделью метаболизма ICG в печени и хорошо согласуются с ранее опубликованными результатами [36–39]. Это указывает на то, что проективную навигационную систему можно использовать для флуоресцентной визуализации распределения ICG in vivo.
Обсуждение
Хирургия под контролем флуоресценции в ближнем ИК-диапазоне требует получения и отображения флуоресцентных изображений в реальном времени в естественном режиме визуального восприятия. В этом исследовании мы разрабатываем систему флуоресцентной навигации для прямого проецирования границ заболевания на поверхность ткани.Этот метод успешно преодолевает ограничения существующих систем флуоресцентной визуализации NIR и избавляет хирургов от визуальных отвлекающих факторов во время хирургической процедуры. С текущими конфигурациями аппаратного и программного обеспечения наша проективная хирургическая навигационная система способна достичь общей скорости визуализации выше 60 кадров в секунду, с задержкой 330 мс, пространственной чувствительностью лучше 0,5 мм как в вертикальном, так и в горизонтальном направлениях, а также проекционное смещение менее 1 мм после соответствующей коррекции высоты.Сравнение флуоресцентных изображений, полученных нашей системой и коммерческой системой визуализации мелких животных IVIS Lumina III (Perkin Elmer, Waltham, MA), показывает схожую чувствительность изображения и динамический диапазон. И мы сравниваем проективную систему с несколькими другими системами визуализации NIRF [18–20, 40–44] в таблице 1, чтобы показать различия.
Применение проективной навигационной системы ограничено из-за отсутствия нацеленных на рак флуоресцентных красителей, поскольку ICG не может специфически связываться с опухолями или раковыми тканями.Если бы было разработано больше флуоресцентных красителей, нацеленных на заболевание, систему проективной хирургической навигации можно было бы использовать для улучшения клинических результатов удаления рака и предоставления информации о локализации для многих злокачественных новообразований тканей. Возможные применения включают предоперационную локализацию опухоли, определение состояния края резекции [4] и выявление иначе пропущенных очагов опухоли [5]. В дополнение к хирургии резекции рака, этот метод также может использоваться в других клинических областях, таких как проекция в реальном времени сосудистой сети ткани, кровотока, оксигенации и структуры скелета, для управляемой пластической хирургии.
Система визуализации, представленная в этой статье, является исследовательским прототипом, демонстрирующим концепцию нового хирургического метода навигации. Перед развертыванием системы для клинического использования необходимы дальнейшая инженерная оптимизация и работы по клинической проверке. В частности, мы дополнительно улучшим производительность системы за счет оптимизации конструкции оборудования, протокола связи и алгоритма регистрации изображений. Во-первых, топографические измерения будут интегрированы в систему, чтобы можно было использовать трехмерный профиль операционного поля для корректировки смещения проекции в реальном времени.Во-вторых, протокол передачи данных и алгоритм обработки изображений будут оптимизированы и упрощены для увеличения скорости навигации и уменьшения артефактов движения. Чтобы еще больше упростить процедуру калибровки, мы заранее сохраним соответствующие матрицы преобразования изображения на различных расстояниях между проектором и хирургической плоскостью, чтобы конкретные калибровочные коэффициенты могли загружаться автоматически на основе обнаруженной информации о высоте без дополнительной операции калибровки. В-третьих, мы оптимизируем дизайн системы, чтобы улучшить ее мобильность и клиническую применимость.Например, источник возбуждающего света, камеры и проекционный модуль будут интегрированы в компактный корпус и помещены в медицинскую тележку для мобильности. Наконец, интегрированная система будет протестирована в клинических испытаниях для хирургии под визуальным контролем.
Вспомогательная информация
Файл S1. Данные на рис. 4 Сравнение способности обнаружения флуоресценции.
Концентрация водного раствора ICG составляет 0, 0,0001, 0,0005, 0,001, 0,002, 0,003, 0,004, 0,006, 0.008, 0,01, 0,02, 0,03, 0,08, 0,1 мг / мл соответственно. Интенсивность флуоресценции определяется при каждой концентрации водного раствора ICG с помощью IVIS Lumina III и системы проекционной хирургической навигации. Среднее значение и стандартное отклонение интенсивности флуоресценции рассчитываются одновременно.
https://doi.org/10.1371/journal.pone.0157794.s001
(XLSX)
S2 Файл. Данные на Рис. 9 Фантом исследуют, чтобы показать проективную точность как функцию разницы в высоте.
Смещение проекции обнаруживается по разнице высот с алгоритмом коррекции высоты и без него. Среднее значение и стандартное отклонение смещения проекции рассчитываются одновременно.
https://doi.org/10.1371/journal.pone.0157794.s002
(XLSX)
Благодарности
Авторы благодарны г-ну Пэн Лю, г-ну Вэньци Рен, г-ну Зелину Ю, г-ну Шуя Хану из Университета науки и технологий Китая, г-же Ронг Ма из Чунцинского медицинского университета и г-же г-ну Шуя Ханю из Чунцинского медицинского университета.Ян Ян из Медицинского университета Аньхой за помощь и полезные обсуждения.
Вклад авторов
Задумал и спроектировал эксперименты: QG DW PS RX. Проведены эксперименты: QG DW JY ZZ. Проанализированы данные: QG DW XW CH. Предоставленные реагенты / материалы / инструменты анализа: JY ZZ RX. Написал статью: QG XW PS RX.
Ссылки
- 1. Apantaku LM. Операция по сохранению груди при раке груди. Американский семейный врач. 2002. 66 (12): 2271–8.pmid: 12507165
- 2. Weber WP, Engelberger S, Viehl CT, Zanetti-Dallenbach R, Kuster S, Dirnhofer S и др. Точность анализа замороженных срезов по сравнению с рентгенографией образцов во время операции по сохранению груди при непальпируемых поражениях. Всемирный журнал хирургии. 2008. 32 (12): 2599–606. pmid: 18836763
- 3. Смитт М.С., Новелс К., Карлсон Р.В., Джеффри СС. Предикторы повторной эксцизии и рецидива после сохранения груди. Int J Radiat Oncol Biol Phys. 2003. 57 (4): 979–85.pmid: 14575828
- 4. Хорст К.С., Смитт М.С., Гоффине Д.Р., Карлсон Р.В. Предикторы местного рецидива после терапии по сохранению груди. Клинический рак груди. 2005. 5 (6): 425–38. pmid: 15748463
- 5. Waljee JF, Hu ES, Newman LA, Alderman AK. Предикторы повторного иссечения у женщин, перенесших операцию по сохранению груди по поводу рака. Анналы хирургической онкологии. 2008. 15 (5): 1297–303. pmid: 18259820
- 6. Парк СС, Мицумори М., Никсон А., Рехт А., Коннолли Дж., Гельман Р. и др.Результат через 8 лет после операции по сохранению груди и лучевой терапии инвазивного рака груди: влияние пограничного статуса и системной терапии на местный рецидив. J Clin Oncol. 2000. 18 (8): 1668–75. pmid: 10764427
- 7. Mery E, Jouve E, Guillermet S, Bourgognon M, Castells M, Golzio M и др. Интраоперационная флуоресцентная визуализация перитонеальной диссеминации карциномы яичников. Доклиническое исследование. Гинекологическая онкология. 2011. 122 (1): 155–62. pmid: 21463889
- 8.Crane L, Themelis G, Arts H, Buddingh K, Brouwers A, Ntziachristos V и др. Интраоперационная флуоресцентная визуализация в ближнем инфракрасном диапазоне для обнаружения сигнальных лимфатических узлов при раке вульвы: первые клинические результаты. Гинекологическая онкология. 2011; 120 (2): 291–5. pmid: 21056907
- 9. Китаи Т., Иномото Т., Мива М., Шикаяма Т. Навигация по флуоресценции с индоцианиновым зеленым для обнаружения сторожевых лимфатических узлов при раке груди. Рак молочной железы. 2005; 12 (3): 211–5. pmid: 16110291
- 10.van der Poel HG, Buckle T, Brouwer OR, Olmos RAV, van Leeuwen FW. Интраоперационное лапароскопическое руководство по флуоресценции сигнального лимфатического узла у пациентов с раком простаты: клиническое подтверждение концепции интегрированного подхода к функциональной визуализации с использованием мультимодального индикатора. Европейская урология. 2011; 60 (4): 826–33. pmid: 21458154
- 11. Морита Ю., Сакагути Т., Унно Н., Шибасаки Ю., Сузуки А., Фукумото К. и др. Обнаружение гепатоцеллюлярной карциномы с помощью флуоресцентной визуализации в ближнем инфракрасном диапазоне с использованием индоцианинового зеленого: его полезность и ограничения.Международный журнал клинической онкологии. 2013. 18 (2): 232–41. pmid: 22200990
- 12. Tan I.C, Maus EA, Rasmussen JC, Marshall MV, Adams KE, Fife CE и др. Оценка сократительной функции лимфатической системы после ручного лимфодренажа с использованием флуоресцентной визуализации в ближнем инфракрасном диапазоне. Архивы физической медицины и реабилитации. 2011. 92 (5): 756–64. e1. pmid: 21530723
- 13. Ямамото Т., Ямамото Н., Дой К., Осима А., Йошимацу Х., Тодокоро Т. и др. Лимфография с усилением индоцианинового зеленого для лимфедемы верхних конечностей: новая система определения степени тяжести с использованием паттернов обратного потока через кожу.Пластическая и реконструктивная хирургия. 2011; 128 (4): 941–7. pmid: 21681123
- 14. Гурфинкель М., Томпсон А.Б., Ральстон В., Трой Т.Л., Мур А.Л., Мур Т.А. и др. Фармакокинетика ICG и HPPH-car для обнаружения нормальных и опухолевых тканей с помощью флуоресценции, визуализации отражения в ближнем инфракрасном диапазоне: тематическое исследование. Фотохимия и фотобиология. 2000. 72 (1): 94–102. pmid: 10911733
- 15. Corlu A, Choe R, Durduran T., Rosen MA, Schweiger M, Arridge SR, et al. Трехмерная флуоресцентная диффузная оптическая томография in vivo рака груди у человека.Оптика экспресс. 2007. 15 (11): 6696–716. pmid: 19546980
- 16. Gioux S, Choi HS, Frangioni JV. Хирургия под визуальным контролем с использованием невидимого ближнего инфракрасного света: основы клинического перевода. Молекулярная визуализация. 2010; 9 (5): 237. pmid: 20868625
- 17. Ярославский А.Н., Патель Р., Вирт Д. Приборы и методы оптической патологии. Патенты Google; 2012.
- 18. Фогт П., Бауэр Э., Грейвс К. Система интраоперационной визуализации Novadaq — текущий статус.Торакальный и сердечно-сосудистый хирург. 2003. 51 (1): 49–51. pmid: 12587091
- 19. Троян С.Л., Кианзад В., Гиббс-Штраус С.Л., Джу С., Мацуи А., Окетокун Р. и др. Система интраоперационной флуоресцентной визуализации в ближнем инфракрасном диапазоне FLARE ™: первое клиническое испытание на людях по картированию сигнальных лимфатических узлов рака груди. Анналы хирургической онкологии. 2009. 16 (10): 2943–52. pmid: 19582506
- 20. Ли Б.Т., Хаттеман М., Гиу С., Стокдейл А., Лин С.Дж., Нго Л.Х. и др. Система интраоперационной флуоресцентной визуализации в ближнем инфракрасном диапазоне FLARE ™: первое клиническое испытание на людях по реконструкции груди с перфорационным лоскутом.Пластическая и реконструктивная хирургия. 2010; 126 (5): 1472. pmid: 21042103
- 21. Лю Ю., Бауэр А.К., Акерс В.Дж., Садлоу Дж., Лян К., Шен Д. и др. Беспроводные очки без рук для флуоресценции в ближнем инфракрасном диапазоне и хирургии под визуальным контролем в реальном времени. Хирургия. 2011. 149 (5): 689–98. pmid: 21496565
- 22. Лю Ю., Нджугуна Р., Мэтьюз Т., Акерс В. Дж., Садлоу Г. П., Мондал С. и др. Флуоресцентная система очков ближнего инфракрасного диапазона с дополнительным датчиком изображения металл-оксид-полупроводник и прозрачным дисплеем.Журнал биомедицинской оптики. 2013; 18 (10): 101303–. pmid: 23728180
- 23. Shao P, Ding H, Wang J, Liu P, Ling Q, Chen J и др. Разработка носимой навигационной системы для хирургической резекции рака под визуальным контролем. Летопись биомедицинской инженерии. 2014. 42 (11): 2228–37. pmid: 24980159
- 24. Ву Дж-Р, Ван М-Л, Лю К-Си, Ху М-Х, Ли Пи. Продвинутая хирургия позвоночника в реальном времени с помощью видимой модели пациента и системы дополненной реальности. Компьютерные методы и программы в биомедицине.2014. 113 (3): 869–81. pmid: 24461259
- 25. Фудзивара М., Мизуками Т., Сузуки А., Фукамизу Х. Обнаружение сторожевых лимфатических узлов у пациентов с раком кожи с использованием флуоресцентной навигации в реальном времени с индоцианиновым зеленым: предварительный опыт. Журнал пластической, реконструктивной и эстетической хирургии. 2009; 62 (10): e373 – e8.
- 26. Юаса Й., Сейке Дж., Йошида Т., Такечи Х., Ямаи Х., Ямамото Й. и др. Биопсия сторожевого лимфатического узла с использованием интраоперационной флуоресцентной визуализации с использованием индоцианинового зеленого и предоперационной КТ-лимфографии для выявления поверхностного рака пищевода.Анналы хирургической онкологии. 2012; 19 (2): 486–93. pmid: 21792510
- 27. Миясиро И., Миёси Н., Хирацука М., Киши К., Ямада Т., Оуэ М. и др. Обнаружение сторожевого узла в хирургии рака желудка с помощью флуоресцентной визуализации индоцианинового зеленого: сравнение с инфракрасной визуализацией. Анналы хирургической онкологии. 2008. 15 (6): 1640–3. pmid: 18379850
- 28. Desmettre T, Devoisselle J, Mordon S. Флуоресцентные свойства и метаболические особенности индоцианинового зеленого (ICG), связанные с ангиографией.Обзор офтальмологии. 2000. 45 (1): 15–27. pmid: 10946079
- 29. Кан И, Чой М., Ли Дж., Кох Г. Ю., Квон К., Чой С. Количественный анализ перфузии периферических тканей с использованием пространственно-временной молекулярной динамики. PLoS One. 2009; 4 (1): e4275. pmid: 19169354
- 30. Meier R, Thürmel K, Moog P, Noël PB, Ahari C, Sievert M и др. Выявление синовита на руках у пациентов с ревматологическими заболеваниями: диагностические возможности оптической визуализации по сравнению с магнитно-резонансной томографией.Артрит и ревматизм. 2012; 64 (8): 2489–98.
- 31. Танака Э., Чой Х.С., Хамблет В., Охниши С., Лоуренс Р.Г., Франджони СП. Интраоперационная оценка состояния внепеченочных желчных протоков у крыс и свиней в режиме реального времени с использованием невидимого флуоресцентного света ближнего инфракрасного диапазона. Хирургия. 2008. 144 (1): 39–48. pmid: 18571583
- 32. Michalet X, Weiss S. Использование статистики фотонов для повышения разрешения микроскопии. Труды Национальной академии наук Соединенных Штатов Америки.2006. 103 (13): 4797–8. pmid: 16549771
- 33. Канеко Х., Хори Дж. Дыхательные движения грудной клетки и брюшной стенки у здоровых субъектов. Респираторная помощь. 2012. 57 (9): 1442–51. pmid: 22348414
- 34. Ясин М.А., Ю. Дж., Юнг Б., Вонг М.С., Анвари Б. Биораспределение инкапсулированного индоцианинового зеленого у здоровых мышей. Молекулярная фармацевтика. 2009. 6 (5): 1321–32. pmid: 19799463
- 35. Черрик Г. Р., Стейн С. В., Ливи С. М., Дэвидсон К. С.. Индоцианин зеленый: наблюдения за его физическими свойствами, распад плазмы и извлечение из печени.Журнал клинических исследований. 1960; 39 (4): 592.
- 36. Эль-Десоки А., Сейфалиан А., Коуп М., Дельпи Д., Дэвидсон Б. Экспериментальное исследование дисфункции печени, оцененное прямым клиренсом индоцианина зеленого с использованием ближней инфракрасной спектроскопии. Британский журнал хирургии. 1999. 86 (8): 1005–11. pmid: 10460634
- 37. Хиллман Э.М., Мур А. Полностью оптическая анатомическая совместная регистрация для молекулярной визуализации мелких животных с использованием динамического контраста. Фотоника природы. 2007. 1 (9): 526–30.pmid: 18974848
- 38. Hillman EM, Amoozegar CB, Wang T., McCaslin AF, Bouchard MB, Mansfield J, et al. Методы оптической визуализации и динамического контраста in vivo для биомедицинских исследований. Философские труды Лондонского королевского общества A: математические, физические и инженерные науки. 2011. 369 (1955): 4620–43.
- 39. Саксена В., Садоки М., Шао Дж. Система доставки полимерных наночастиц для индоцианинового зеленого: биораспределение у здоровых мышей. Международный фармацевтический журнал.2006. 308 (1): 200–4.
- 40. Themelis G, Yoo JS, Soh K-S, Schulz R, Ntziachristos V. Система интраоперационной флуоресцентной визуализации в реальном времени с использованием коррекции поглощения света. Журнал биомедицинской оптики. 2009. 14 (6): 064012–9. pmid: 20059250
- 41. Hutteman M, Mieog J, Van der Vorst J, Dijkstra J, Kuppen P, van der Laan A, et al. Интраоперационная флуоресцентная визуализация в ближнем инфракрасном диапазоне колоректальных метастазов, направленных на экспрессию интегрина α v β 3 в сингенной модели крыс.Европейский журнал хирургической онкологии (EJSO). 2011; 37 (3): 252–7.
- 42. Mieog JSD, Vahrmeijer AL, Hutteman M, Van der Vorst JR, Van Hooff MD, Dijkstra J, et al. Новая система интраоперационной флуоресцентной камеры в ближнем инфракрасном диапазоне для онкологической хирургии с оптическим контролем изображения. Молекулярная визуализация. 2010; 9 (4): 223. pmid: 20643025
- 43. Schaafsma BE, Mieog JSD, Hutteman M, Van der Vorst JR, Kuppen PJ, Löwik CW и др. Клиническое использование индоцианинового зеленого в качестве флуоресцентного контрастного агента ближнего инфракрасного диапазона для онкологической хирургии под визуальным контролем.Журнал хирургической онкологии. 2011. 104 (3): 323–32. pmid: 21495033
- 44. Тагая Н., Ямадзаки Р., Накагава А., Абэ А., Хамада К., Кубота К. и др. Интраоперационная идентификация сторожевых лимфатических узлов с помощью флуоресцентной визуализации в ближнем инфракрасном диапазоне у пациентов с раком груди. Американский журнал хирургии. 2008. 195 (6): 850–3. pmid: 18353274
| Бесплатный полнотекстовый | Искусственный маркер и метод оценки положения на основе МЭМС IMU для соответствия требованиям к посадке многороторного БПЛА
3.1. Описание экспериментов
Чтобы продемонстрировать производительность предложенной системы, мы провели полевые испытания и проанализировали результаты с двух сторон: найденные ошибки позы и ошибки перепроецирования угловых точек. В качестве эталонов для позы использовались интегрированные навигационные системы GNSS и высокоточный волоконно-оптический IMU (POS320, MAP Space Time Navigation Technology Co., LTD, Ухань, Китай). В качестве тестируемой системы использовались камера и навигационная система, интегрированная с MEMS IMU (ICM20602).В экспериментах использовалась камера с глобальным затвором и разрешением 644 × 484 (Mako G-030C, Allied Vision, Stadtroda, Германия). Скорость передачи данных IMU составляла 50 кадров в секунду, а частота кадров изображения — 20 кадров в секунду. На рисунке 7 показана платформа экспериментального оборудования. Пространственное смещение ИДУ и камеры было предварительно откалибровано [41]. В таблице 1 представлены технические параметры двух IMU. Положение и направление маркера в электронном кадре были ранее получены с помощью статических измерений кинематики с постобработкой (PPK) GNSS.Размер маркера, использованного в испытаниях, составлял 29 см × 29 см. Без дорогостоящей системы захвата движения слишком сложно, если не невозможно, получить надежную модель автомобиля с легким грузом. Машина с четырьмя шаговыми двигателями, позволяющая точно перемещать камеру в трехмерном пространстве, была спроектирована и построена в [29] для оценки предполагаемого положения камеры относительно точки. создатель. Хотя высокоточные интегрированные системы GNSS / INS могут обеспечивать эталоны позы с шестью степенями свободы, они обычно слишком тяжелы (более 10 кг) для установки на БПЛА (как тот, который использовался в наших экспериментах).Поэтому мы держим экспериментальное устройство с системой отсчета в руке, чтобы имитировать движение и траекторию БПЛА при приземлении, чтобы убедительно оценить точность позы. Система координат позы GNSS / INS была закреплена на жесткой платформе с камерой и MEMS IMU. Положение и угловое смещение между двумя IMU были откалиброваны ранее, чтобы передать достоверную информацию в центр MEMS IMU. Положение фазового центра антенны относительно системы отсчета также измерялось заранее.Данные камеры, IMU и GNSS были собраны для постобработки. Мы выполнили постобработку кинематики (PPK) для обработки данных GNSS, затем результаты сглаживания интегрированной навигации GNSS / INS были рассчитаны как достоверные. Эксперименты проводились пять раз на площади Дружбы в Уханьском университете 28 февраля 2019 года. Изменение траектории и положения тестовой платформы в пятом тесте показано на рисунках 8 и 9. Условия проведения экспериментов показаны на рисунке 10.3.2. Обсуждение результатов
Погрешности положения и ориентации результатов чисто визуального решения в третьем тесте показаны на рисунках 11 и 12, соответственно. Статистические результаты погрешностей положения и отношения визуального решения для пяти экспериментов показаны на Таблица 2 и Таблица 3 соответственно. Максимальные и средние значения погрешности вычисляются по последовательности абсолютных погрешностей по всей статье, таблицы показывают, что погрешность позиционирования визуального решения не превышает 0.01 м в любом из трех направлений. Можно заметить, что результаты позиционирования в горизонтальном направлении менее точны и более нестабильны, чем в вертикальном направлении. Учитывая, что доступное количество спутников превышало 20 и в наших экспериментах неоднозначности фазы несущей были разрешены до их целочисленных значений, точность позиционирования сглаживания PPK можно было считать на сантиметровом уровне [42]. Между тем, очевидно, что шумовые влияния визуального позиционирования и позиционирования PPK не зависят друг от друга, следовательно, абсолютная точность позиционирования предлагаемого визуального решения эквивалентна сглаженной точности позиционирования PPK.Для ошибок ориентации среднеквадратичная ошибка (RMSE) угла крена составляла 0,45 ° (1σ), ошибка угла тангажа составляла 0,43 ° (1σ), а ошибка угла курса составляла 0,1 ° (1σ). Поскольку все углы маркера находятся в горизонтальной плоскости (почти параллельно p-кадру), мы можем очень точно рассчитать угол курса на основе положения соответствующих точек на изображении, но оценки крена и тангажа меньше стабильно из-за отсутствия наблюдений в вертикальном направлении.
Статистические результаты ошибок положения и ориентации решения визуального / инерционного синтеза в пяти экспериментах показаны в Таблице 4 и Таблице 5, соответственно.Статистические результаты показывают, что ошибки позиционирования визуального / инерциального интегрированного решения не превышают 0,01 м в любом из трех направлений, что согласуется с визуальным решением.
Кроме того, были рассчитаны ошибки перепроецирования для подтверждения точности позы. Угловые точки на изображении, которые не используются для оценки (отклонены RANSAC), были спроецированы в w-кадр по оцененной позе, и были вычислены ошибки по сравнению с реальными углами 3D в горизонтальном направлении.Результаты первого теста показаны на рисунке 13, а статистические результаты пяти экспериментов показаны в таблице 6.Статистические результаты показывают, что ошибка повторного проецирования угла составляет 0,022 м (1σ), что также подтверждает, что точность определения местоположения предлагаемой системы находится на сантиметровом уровне.
Для ошибок ориентации из статистических результатов в Таблице 5 можно увидеть, что ошибка угла крена составляет 0,30 ° (1σ), ошибка угла тангажа составляет 0,20 ° (1σ), а ошибка угла курса равна 0.07 ° (1σ). По сравнению с чисто визуальным решением точность углов крена и тангажа увеличилась в среднем на 33% и 54% соответственно. Кроме того, на рисунке 14 показано, что угол тангажа и угол крена, оцененные интегрированной навигацией, более стабильны и плавны, чем у визуального решения. Благодаря превосходной чувствительности IMU к движению транспортного средства, горизонтальная угловая вибрация, вызванная маневром, снижается за счет слияния с INS. Системы ориентации и курса (AHRS) [43,44] широко используются для непрерывной оценки ориентации для управление полетом БПЛА, поскольку оно не зависит от GNSS.Он использует IMU для оценки угла тангажа и крена и увеличения магнитометра для улучшения курсовой устойчивости. Поскольку в нашем тестовом устройстве не было магнитометра, мы использовали данные IMU для AHRS и сравнили точность и стабильность горизонтальных углов. В тесте использовался алгоритм Mahony AHRS [45]. На рисунке 15 показаны ошибки по крену и тангажу двух систем в четвертом испытании.Можно заметить, что оценка угла крена и тангажа предлагаемой системой намного более точна и стабильна, чем оценка AHRS.AHRS обеспечивает углы тангажа и крена относительно вектора силы тяжести земли, таким образом, точность горизонтальных углов страдает от ускорения транспортного средства, поскольку он не может быть отделен только IMU. В тестах мы держали платформу для движения по кругу, поэтому изменение направления ускорения привело к синусоидальной кривой угловой ошибки AHRS. Что касается горизонтальных углов, оцененных предлагаемой системой, ошибка определения положения, полученного с помощью INS, была связана с ошибкой ориентации, следовательно, разница между высокоточным положением, полученным с помощью обнаружения маркера, и положением INS может исправить ошибку по крену и тангажу. углы фильтром.
Как упоминалось выше, INS может обеспечивать непрерывные результаты позиционирования, когда внешний вспомогательный источник недоступен на короткое время. Чтобы проиллюстрировать, что наша система устойчива к сбоям при извлечении маркеров, мы искусственно прервали визуальную коррекцию при обработке данных и рассчитали ошибки результатов позиционирования. Мы установили пять отключений для каждого теста, и каждое отключение было установлено на 5 секунд. На рисунках 16 и 17 показаны ошибки положения и перепроецирования симуляционных экспериментов в пятом тесте соответственно.Погрешность положения в горизонтальном и вертикальном направлении для 25 отключений во всех тестах составляет 0,41 и 0,09 м (1σ) соответственно, что указывает на то, что предложенная система может обеспечить стабильную и надежную оценку положения, когда маркер иногда оказывается недействительным. Однако навигационная ошибка INS накапливается со временем, как показано на рисунке 17, следовательно, длительный отказ обнаружения маркеров ухудшит характеристики. Чтобы проверить надежность предлагаемой системы, когда БПЛА находится на относительной большей высоте или на большой высоте. При маневре под углом мы держали тестовую платформу на расстоянии 8 м, чтобы зафиксировать маркер без наклона и с наклоном 40 градусов соответственно.По мере увеличения расстояния маркер на изображении становится меньше, а поле зрения становится больше, поэтому в поле зрения попадали объекты различной формы вокруг маркера, что приводило к образованию мусора на фигурах. Будет сопоставлен только многоугольник, содержащий правильную информацию о градациях серого. На рисунке 18 представлены результаты извлечения контуров и обнаружения маркеров в двух ситуациях. Погрешности позиционирования (RMS) в вертикальном направлении для этих двух испытаний составляют 0,12 и 0,23 м соответственно. Погрешности по горизонтали равны 0.21 и 0,30 м соответственно. Можно заметить, что большое расстояние и большой угол наклона не повлияли на обнаружение маркера. Однако ошибка позиционирования увеличивалась, поскольку маркер на изображении был маленьким, а геометрическое состояние угловых точек было плохим. Поскольку точная посадка БПЛА зависит в первую очередь от точности позы, когда он приближается к посадочной площадке, результатов позиционирования на таком расстоянии достаточно, чтобы БПЛА приблизился к цели. Наконец, мы фиксируем время, затраченное на каждый модуль система провела более 1000 испытаний на комплекте разработчика Tegra K1 (NVIDIA, Санта-Клара, Калифорния, США), включая процессор 4-Plus-1 ARM Cortex-A15.Результаты показаны в таблице 7. Из затрат времени в таблице 7 видно, что система работает эффективно. Самая трудоемкая часть — это обнаружение маркеров, которое требует большого количества операций с пикселями, в то время как другие части занимают относительно меньшее время, поскольку им нужно обрабатывать только небольшой объем данных низкой размерности. В целом, среднее время, затрачиваемое всей системой, составляет 32,26 мс, что соответствует требованиям управления БПЛА в реальном времени.Произошла ошибка при установке пользовательского файла cookie
Произошла ошибка при настройке вашего пользовательского файла cookieЭтот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или уточнить у системного администратора.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файлах cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
.